 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DPVNet: Patch-level 3D Hough Voting Network for 6D Pose Estimation
Paper and Code
Sep 15, 2020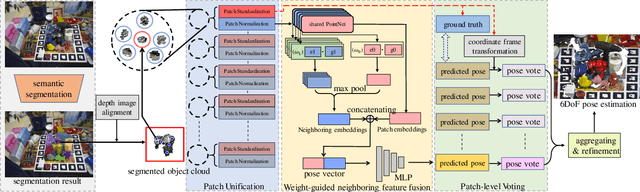

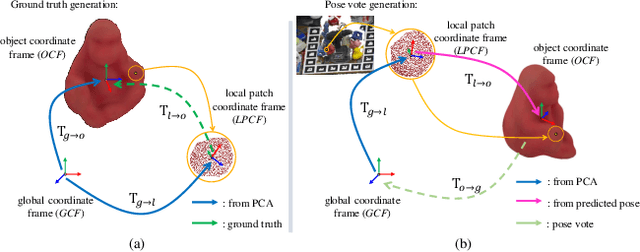
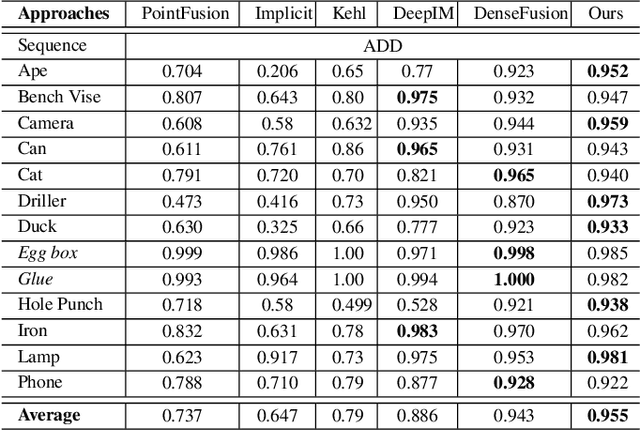
In this paper, we focus on estimating the 6D pose of objects in point clouds. Although the topic has been widely studied, pose estimation in point clouds remains a challenging problem due to the noise and occlusion. To address the problem, a novel 3DPVNet is presented in this work, which utilizes 3D local patches to vote for the object 6D poses. 3DPVNet is comprised of three modules. In particular, a Patch Unification (\textbf{PU}) module is first introduced to normalize the input patch, and also create a standard local coordinate frame on it to generate a reliable vote. We then devise a Weight-guided Neighboring Feature Fusion (\textbf{WNFF}) module in the network, which fuses the neighboring features to yield a semi-global feature for the center patch. WNFF module mines the neighboring information of a local patch, such that the representation capability to local geometric characteristics is significantly enhanced, making the method robust to a certain level of noise. Moreover, we present a Patch-level Voting (\textbf{PV}) module to regress transformations and generates pose votes. After the aggregation of all votes from patches and a refinement step, the final pose of the object can be obtained. Compared to recent voting-based methods, 3DPVNet is patch-level, and directly carried out on point clouds. Therefore, 3DPVNet achieves less computation than point/pixel-level voting scheme, and has robustness to partial data. Experiments on several datasets demonstrate that 3DPVNet achieves the state-of-the-art performance, and is also robust against noise and occlusions.