 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DEG: Data-Driven Descriptor Extraction for Global re-localization in subterranean environments
Paper and Code
Oct 13, 2022
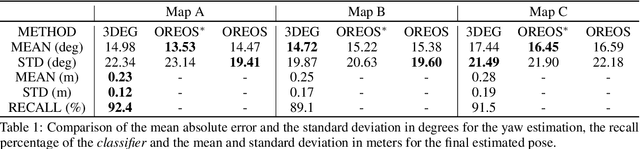

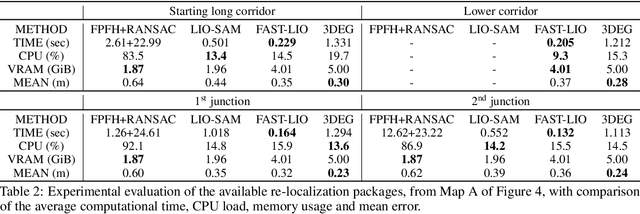
Current global re-localization algorithms are built on top of localization and mapping methods and heavily rely on scan matching and direct point cloud feature extraction and therefore are vulnerable in featureless demanding environments like caves and tunnels. In this article, we propose a novel global re-localization framework that: a) does not require an initial guess, like most methods do, while b) it has the capability to offer the top-k candidates to choose from and last but not least provides an event-based re-localization trigger module for enabling, and c) supporting completely autonomous robotic missions. With the focus on subterranean environments with low features, we opt to use descriptors based on range images from 3D LiDAR scans in order to maintain the depth information of the environment. In our novel approach, we make use of a state-of-the-art data-driven descriptor extraction framework for place recognition and orientation regression and enhance it with the addition of a junction detection module that also utilizes the descriptors for classification purposes.