 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D tracking of water hazards with polarized stereo cameras
Paper and Code
Feb 26, 2017
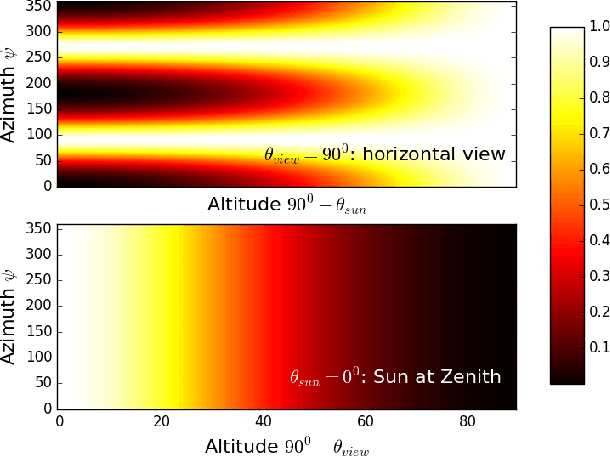
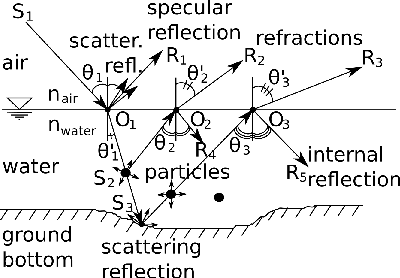

Current self-driving car systems operate well in sunny weather but struggle in adverse conditions. One of the most commonly encountered adverse conditions involves water on the road caused by rain, sleet, melting snow or flooding. While some advances have been made in using conventional RGB camera and LIDAR technology for detecting water hazards, other sources of information such as polarization offer a promising and potentially superior approach to this problem in terms of performance and cost. In this paper, we present a novel stereo-polarization system for detecting and tracking water hazards based on polarization and color variation of reflected light, with consideration of the effect of polarized light from sky as function of reflection and azimuth angles. To evaluate this system, we present a new large `water on road' datasets spanning approximately 2 km of driving in various on-road and off-road conditions and demonstrate for the first time reliable water detection and tracking over a wide range of realistic car driving water conditions using polarized vision as the primary sensing modality. Our system successfully detects water hazards up to more than 100m. Finally, we discuss several interesting challenges and propose future research directions for further improving robust autonomous car perception in hazardous wet conditions using polarization sensors.