 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D-RelNet: Joint Object and Relational Network for 3D Prediction
Paper and Code


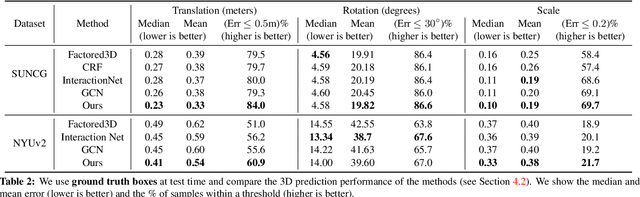

We propose an approach to predict the 3D shape and pose for the objects present in a scene. Existing learning based methods that pursue this goal make independent predictions per object, and do not leverage the relationships amongst them. We argue that reasoning about these relationships is crucial, and present an approach to incorporate these in a 3D prediction framework. In addition to independent per-object predictions, we predict pairwise relations in the form of relative 3D pose, and demonstrate that these can be easily incorporated to improve object level estimates. We report performance across different datasets (SUNCG, NYUv2), and show that our approach significantly improves over independent prediction approaches while also outperforming alternate implicit reasoning methods.