 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Point-to-Keypoint Voting Network for 6D Pose Estimation
Paper and Code
Dec 22, 2020

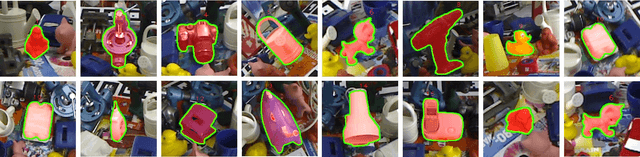

Object 6D pose estimation is an important research topic in the field of computer vision due to its wide application requirements and the challenges brought by complexity and changes in the real-world. We think fully exploring the characteristics of spatial relationship between points will help to improve the pose estimation performance, especially in the scenes of background clutter and partial occlusion. But this information was usually ignored in previous work using RGB image or RGB-D data. In this paper, we propose a framework for 6D pose estimation from RGB-D data based on spatial structure characteristics of 3D keypoints. We adopt point-wise dense feature embedding to vote for 3D keypoints, which makes full use of the structure information of the rigid body. After the direction vectors pointing to the keypoints are predicted by CNN, we use RANSAC voting to calculate the coordinate of the 3D keypoints, then the pose transformation can be easily obtained by the least square method. In addition, a spatial dimension sampling strategy for points is employed, which makes the method achieve excellent performance on small training sets. The proposed method is verified on two benchmark datasets, LINEMOD and OCCLUSION LINEMOD. The experimental results show that our method outperforms the state-of-the-art approaches, achieves ADD(-S) accuracy of 98.7\% on LINEMOD dataset and 52.6\% on OCCLUSION LINEMOD dataset in real-time.