 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Pipe Network Reconstruction Based on Structure from Motion with Incremental Conic Shape Detection and Cylindrical Constraint
Paper and Code
Jul 03, 2020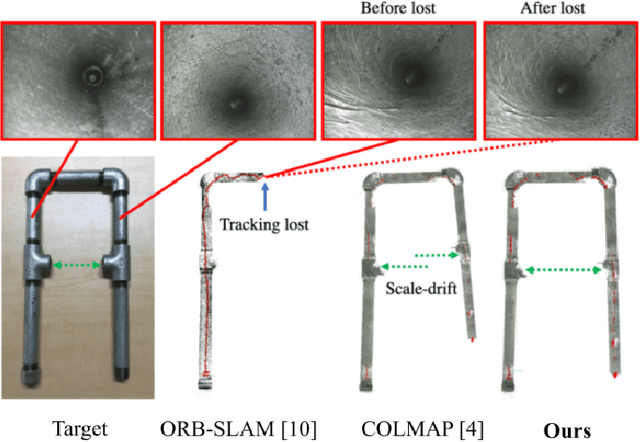
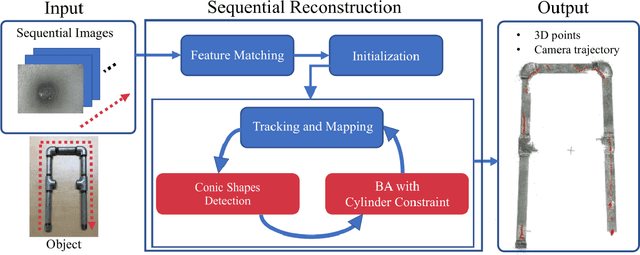
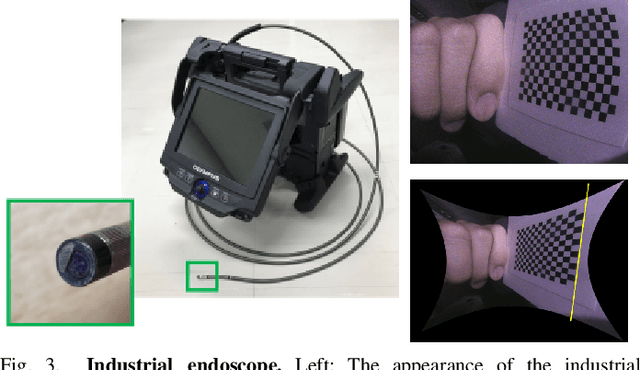
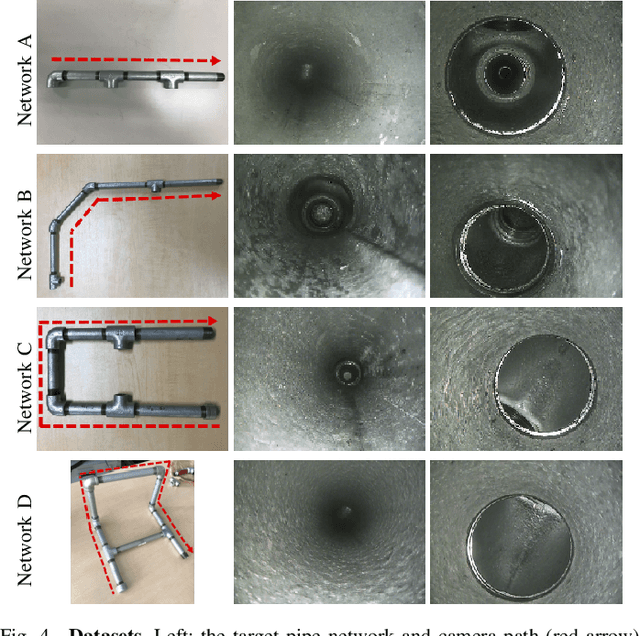
Pipe inspection is a critical task for many industries and infrastructure of a city. The 3D information of a pipe can be used for revealing the deformation of the pipe surface and position of the camera during the inspection. In this paper, we propose a 3D pipe reconstruction system using sequential images captured by a monocular endoscopic camera. Our work extends a state-of-the-art incremental Structure-from-Motion (SfM) method to incorporate prior constraints given by the target shape into bundle adjustment (BA). Using this constraint, we can minimize the scale-drift that is the general problem in SfM. Moreover, our method can reconstruct a pipe network composed of multiple parts including straight pipes, elbows, and tees. In the experiments, we show that the proposed system enables more accurate and robust pipe mapping from a monocular camera in comparison with existing state-of-the-art methods.