 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Object Classification on Partial Point Clouds: A Practical Perspective
Paper and Code
Dec 23, 2020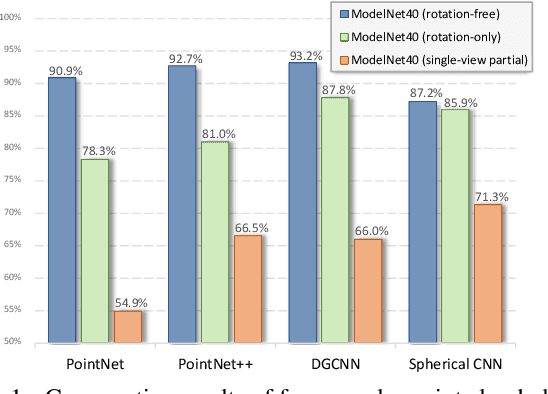
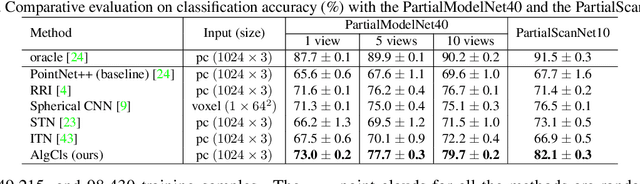
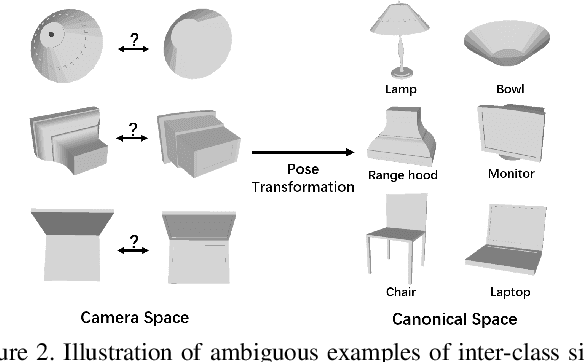
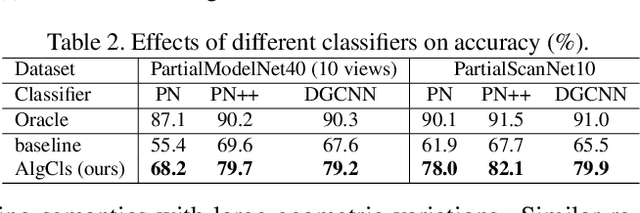
A point cloud is a popular shape representation adopted in 3D object classification, which covers the whole surface of an object and is usually well aligned. However, such an assumption can be invalid in practice, as point clouds collected in real-world scenarios are typically scanned from visible object parts observed under arbitrary SO(3) viewpoint, which are thus incomplete due to self and inter-object occlusion. In light of this, this paper introduces a practical setting to classify partial point clouds of object instances under any poses. Compared to the classification of complete object point clouds, such a problem is made more challenging in view of geometric similarities of local shape across object classes and intra-class dissimilarities of geometries restricted by their observation view. We consider that specifying the location of partial point clouds on their object surface is essential to alleviate suffering from the aforementioned challenges, which can be solved via an auxiliary task of 6D object pose estimation. To this end, a novel algorithm in an alignment-classification manner is proposed in this paper, which consists of an alignment module predicting object pose for the rigid transformation of visible point clouds to their canonical pose and a typical point classifier such as PointNet++ and DGCNN. Experiment results on the popular ModelNet40 and ScanNet datasets, which are adapted to a single-view partial setting, demonstrate the proposed method can outperform three alternative schemes extended from representative point cloud classifiers for complete point clouds.