 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Concept Grounding on Neural Fields
Paper and Code
Jul 13, 2022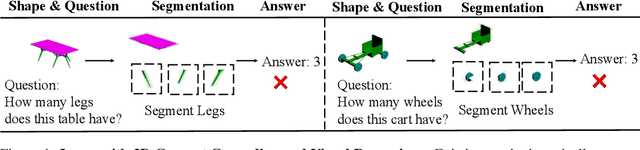
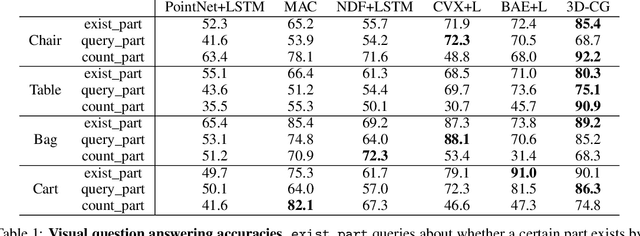
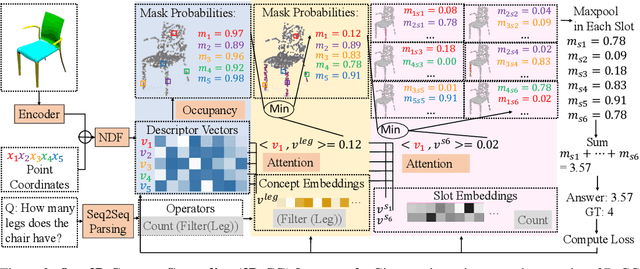
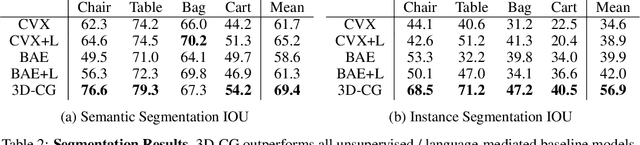
In this paper, we address the challenging problem of 3D concept grounding (i.e. segmenting and learning visual concepts) by looking at RGBD images and reasoning about paired questions and answers. Existing visual reasoning approaches typically utilize supervised methods to extract 2D segmentation masks on which concepts are grounded. In contrast, humans are capable of grounding concepts on the underlying 3D representation of images. However, traditionally inferred 3D representations (e.g., point clouds, voxelgrids, and meshes) cannot capture continuous 3D features flexibly, thus making it challenging to ground concepts to 3D regions based on the language description of the object being referred to. To address both issues, we propose to leverage the continuous, differentiable nature of neural fields to segment and learn concepts. Specifically, each 3D coordinate in a scene is represented as a high-dimensional descriptor. Concept grounding can then be performed by computing the similarity between the descriptor vector of a 3D coordinate and the vector embedding of a language concept, which enables segmentations and concept learning to be jointly learned on neural fields in a differentiable fashion. As a result, both 3D semantic and instance segmentations can emerge directly from question answering supervision using a set of defined neural operators on top of neural fields (e.g., filtering and counting). Experimental results show that our proposed framework outperforms unsupervised/language-mediated segmentation models on semantic and instance segmentation tasks, as well as outperforms existing models on the challenging 3D aware visual reasoning tasks. Furthermore, our framework can generalize well to unseen shape categories and real scans.