 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3-D Velocity Regulation for Nonholonomic Source Seeking Without Position Measurement
Paper and Code
Apr 24, 2015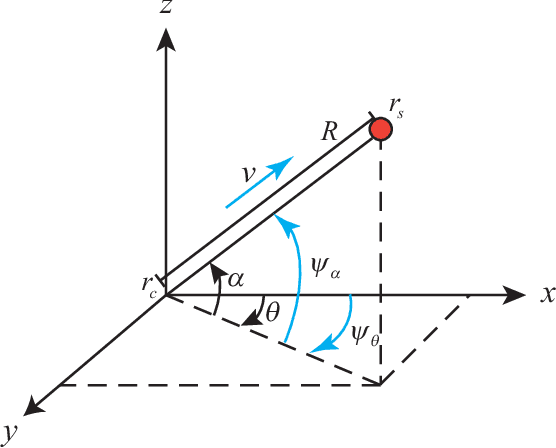
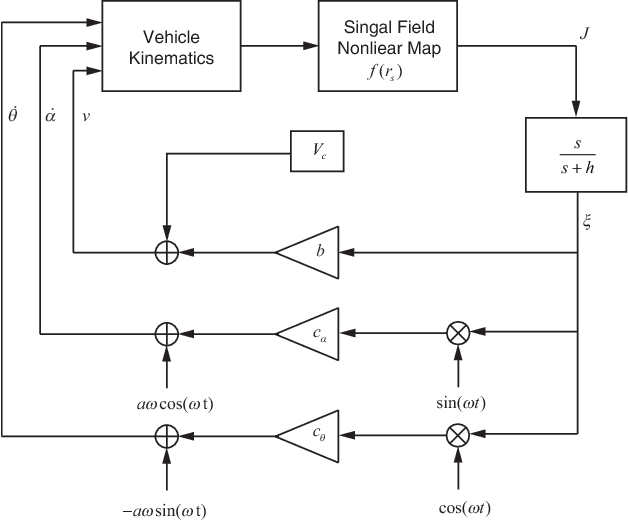
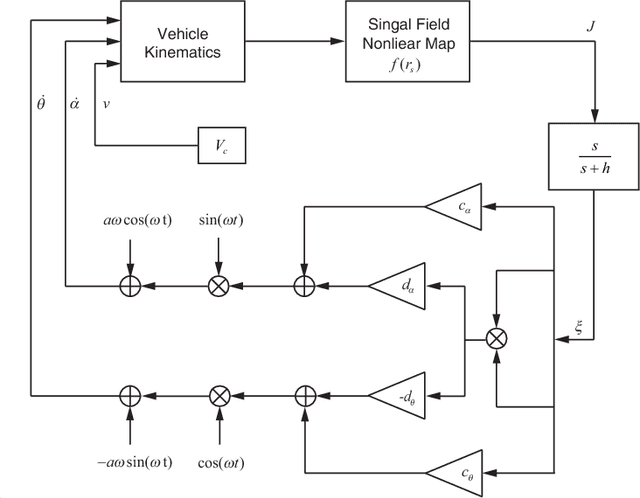
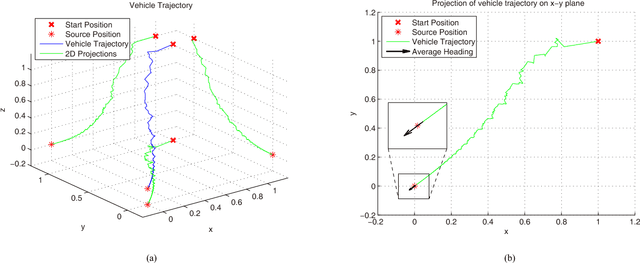
We consider a three-dimensional problem of steering a nonholonomic vehicle to seek an unknown source of a spatially distributed signal field without any position measurement. In the literature, there exists an extremum seeking-based strategy under a constant forward velocity and tunable pitch and yaw velocities. Obviously, the vehicle with a constant forward velocity may exhibit certain overshoots in the seeking process and can not slow down even it approaches the source. To resolve this undesired behavior, this paper proposes a regulation strategy for the forward velocity along with the pitch and yaw velocities. Under such a strategy, the vehicle slows down near the source and stays within a small area as if it comes to a full stop, and controllers for angular velocities become succinct. We prove the local exponential convergence via the averaging technique. Finally, the theoretical results are illustrated with simulations.