 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDAD vision: opto-electronic co-designed computer vision with division adjoint method
Nov 04, 2022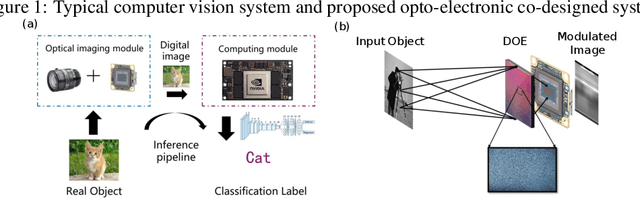
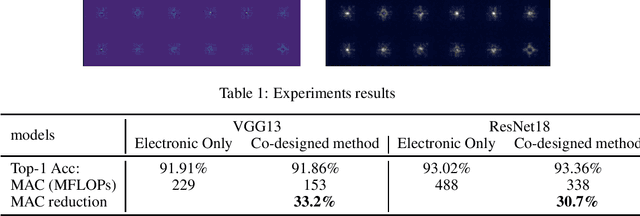
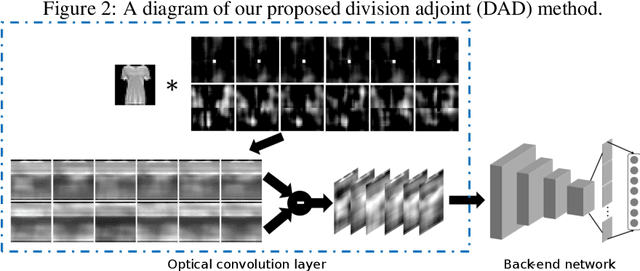
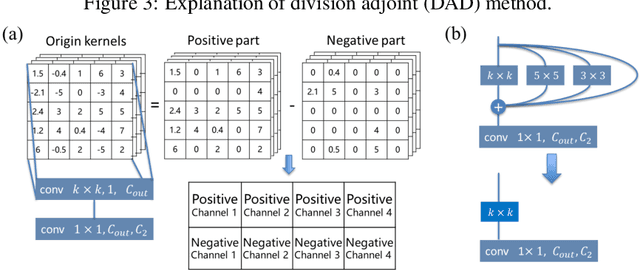
The miniaturization and mobility of computer vision systems are limited by the heavy computational burden and the size of optical lenses. Here, we propose to use a ultra-thin diffractive optical element to implement passive optical convolution. A division adjoint opto-electronic co-design method is also proposed. In our simulation experiments, the first few convolutional layers of the neural network can be replaced by optical convolution in a classification task on the CIFAR-10 dataset with no power consumption, while similar performance can be obtained.
Ultrafast Parallel LiDAR with Time-encoding and Spectral Scanning: Breaking the Time-of-flight Limit
Mar 09, 2021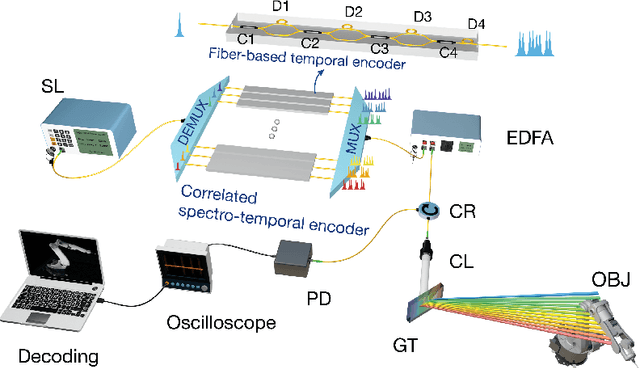
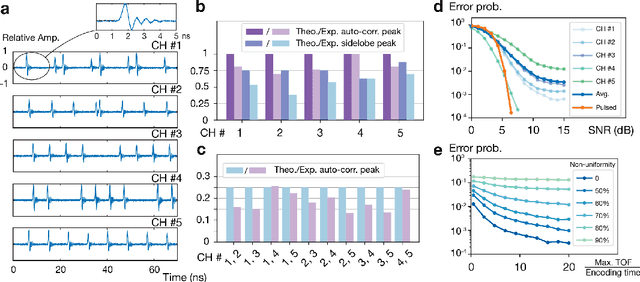
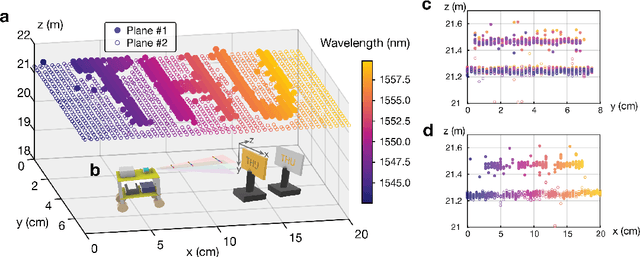
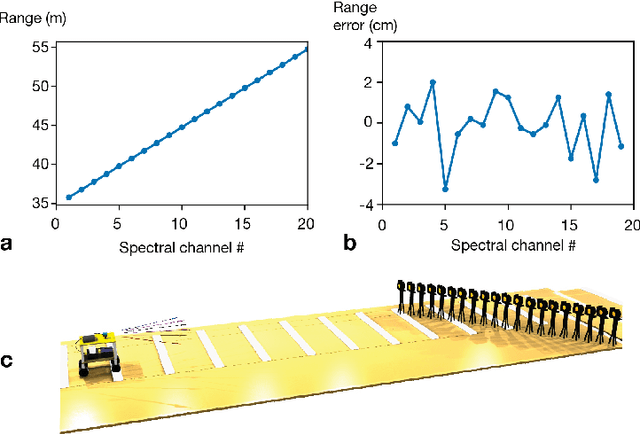
Light detection and ranging (LiDAR) has been widely used in autonomous driving and large-scale manufacturing. Although state-of-the-art scanning LiDAR can perform long-range three-dimensional imaging, the frame rate is limited by both round-trip delay and the beam steering speed, hindering the development of high-speed autonomous vehicles. For hundred-meter level ranging applications, a several-time speedup is highly desirable. Here, we uniquely combine fiber-based encoders with wavelength-division multiplexing devices to implement all-optical time-encoding on the illumination light. Using this method, parallel detection and fast inertia-free spectral scanning can be achieved simultaneously with single-pixel detection. As a result, the frame rate of a scanning LiDAR can be multiplied with scalability. We demonstrate a 4.4-fold speedup for a maximum 75-m detection range, compared with a time-of-flight-limited laser ranging system. This approach has the potential to improve the velocity of LiDAR-based autonomous vehicles to the regime of hundred kilometers per hour and open up a new paradigm for ultrafast-frame-rate LiDAR imaging.