 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Efficiency Pedestrian Crossing Prediction
Apr 04, 2022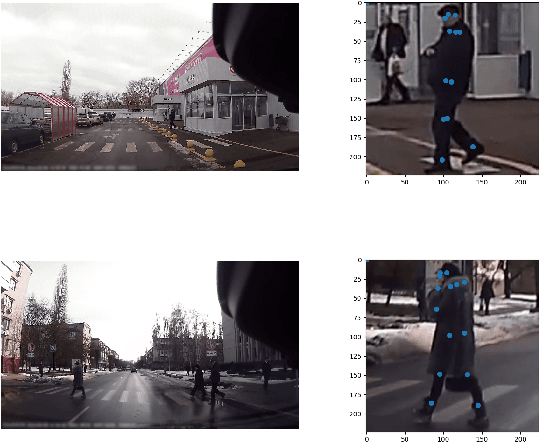

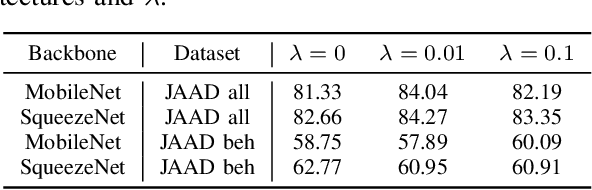

Predicting pedestrian crossing intention is an indispensable aspect of deploying advanced driving systems (ADS) or advanced driver-assistance systems (ADAS) to real life. State-of-the-art methods in predicting pedestrian crossing intention often rely on multiple streams of information as inputs, each of which requires massive computational resources and heavy network architectures to generate. However, such reliance limits the practical application of the systems. In this paper, driven the the real-world demands of pedestrian crossing intention prediction models with both high efficiency and accuracy, we introduce a network with only frames of pedestrians as the input. Every component in the introduced network is driven by the goal of light weight. Specifically, we reduce the multi-source input dependency and employ light neural networks that are tailored for mobile devices. These smaller neural networks can fit into computer memory and can be transmitted over a computer network more easily, thus making them more suitable for real-life deployment and real-time prediction. To compensate the removal of the multi-source input, we enhance the network effectiveness by adopting a multi-task learning training, named "side task learning", to include multiple auxiliary tasks to jointly learn the feature extractor for improved robustness. Each head handles a specific task that potentially shares knowledge with other heads. In the meantime, the feature extractor is shared across all tasks to ensure the sharing of basic knowledge across all layers. The light weight but high efficiency characteristics of our model endow it the potential of being deployed on vehicle-based systems. Experiments validate that our model consistently delivers outstanding performances.
Physical Reasoning in an Open World
Jan 22, 2022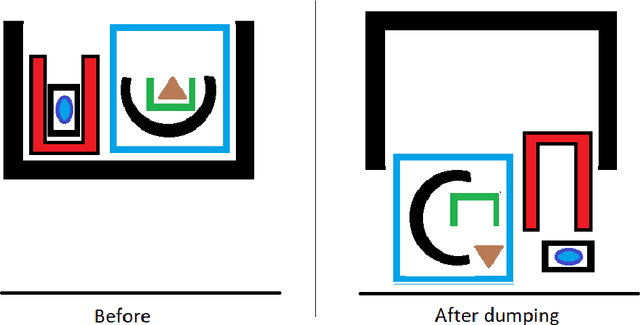
Most work on physical reasoning, both in artificial intelligence and in cognitive science, has focused on closed-world reasoning, in which it is assumed that the problem specification specifies all relevant objects and substance, all their relations in an initial situation, and all exogenous events. However, in many situations, it is important to do open-world reasoning; that is, making valid conclusions from very incomplete information. We have implemented in Prolog an open-world reasoner for a toy microworld of containers that can be loaded, unloaded, sealed, unsealed, carried, and dumped.