Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical Reasoning in an Open World
Paper and Code
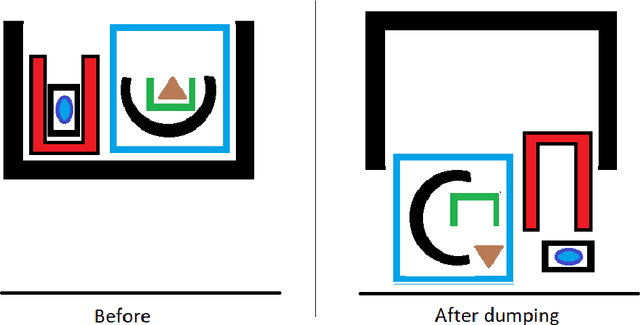
Most work on physical reasoning, both in artificial intelligence and in cognitive science, has focused on closed-world reasoning, in which it is assumed that the problem specification specifies all relevant objects and substance, all their relations in an initial situation, and all exogenous events. However, in many situations, it is important to do open-world reasoning; that is, making valid conclusions from very incomplete information. We have implemented in Prolog an open-world reasoner for a toy microworld of containers that can be loaded, unloaded, sealed, unsealed, carried, and dumped.
* Presented at The Ninth Advances in Cognitive Systems (ACS) Conference
2021 (arXiv:2201.06134)
View paper on