 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGroup channel pruning and spatial attention distilling for object detection
Jun 02, 2023Due to the over-parameterization of neural networks, many model compression methods based on pruning and quantization have emerged. They are remarkable in reducing the size, parameter number, and computational complexity of the model. However, most of the models compressed by such methods need the support of special hardware and software, which increases the deployment cost. Moreover, these methods are mainly used in classification tasks, and rarely directly used in detection tasks. To address these issues, for the object detection network we introduce a three-stage model compression method: dynamic sparse training, group channel pruning, and spatial attention distilling. Firstly, to select out the unimportant channels in the network and maintain a good balance between sparsity and accuracy, we put forward a dynamic sparse training method, which introduces a variable sparse rate, and the sparse rate will change with the training process of the network. Secondly, to reduce the effect of pruning on network accuracy, we propose a novel pruning method called group channel pruning. In particular, we divide the network into multiple groups according to the scales of the feature layer and the similarity of module structure in the network, and then we use different pruning thresholds to prune the channels in each group. Finally, to recover the accuracy of the pruned network, we use an improved knowledge distillation method for the pruned network. Especially, we extract spatial attention information from the feature maps of specific scales in each group as knowledge for distillation. In the experiments, we use YOLOv4 as the object detection network and PASCAL VOC as the training dataset. Our method reduces the parameters of the model by 64.7 % and the calculation by 34.9%.
* Appl Intell
Recognition of Pyralidae Insects Using Intelligent Monitoring Autonomous Robot Vehicle in Natural Farm Scene
Mar 26, 2019
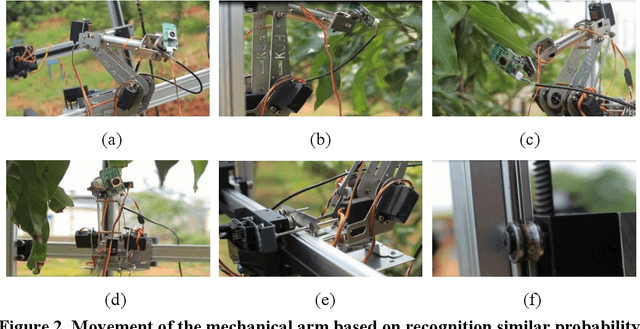
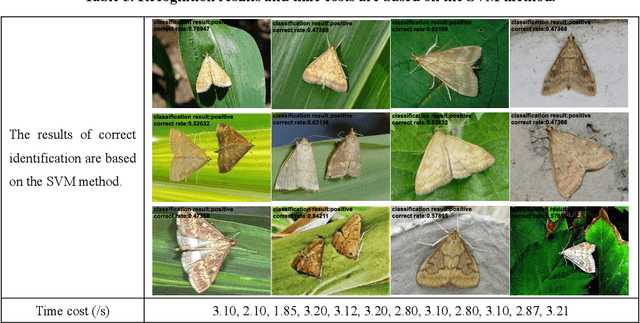
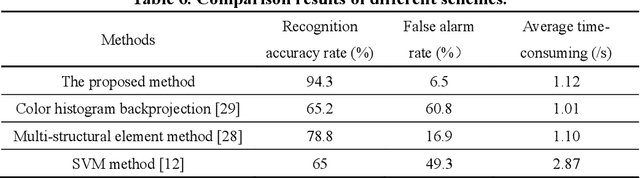
The Pyralidae pests, such as corn borer and rice leaf roller, are main pests in economic crops. The timely detection and identification of Pyralidae pests is a critical task for agriculturists and farmers. However, the traditional identification of pests by humans is labor intensive and inefficient. To tackle the challenges, a pest monitoring autonomous robot vehicle and a method to recognize Pyralidae pests are presented in this paper. Firstly, the robot on autonomous vehicle collects images by performing camera sensing in natural farm scene. Secondly, the total probability image can be obtained by using inverse histogram mapping, and then the object contour of Pyralidae pests can be extracted quickly and accurately with the constrained Otsu method. Finally, by employing Hu moment and the perimeter and area characteristics, the correct contours of objects can be drawn, and the recognition results can be obtained by comparing them with the reference templates of Pyralidae pests. Additionally, the moving speed of the mechanical arms on the vehicle can be adjusted adaptively by interacting with the recognition algorithm. The experimental results demonstrate that the robot vehicle can automatically capture pest images, and can achieve 94.3$\%$ recognition accuracy in natural farm planting scene.