 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Beamforming Codebooks for Active Sensing with Reconfigurable Intelligent Surface
Mar 24, 2025



This paper explores the design of beamforming codebooks for the base station (BS) and for the reconfigurable intelligent surfaces (RISs) in an active sensing scheme for uplink localization, in which the mobile user transmits a sequence of pilots to the BS through reflection at the RISs, and the BS and the RISs are adaptively configured by carefully choosing BS beamforming codeword and RIS codewords from their respective codebooks in a sequential manner to progressively focus onto the user. Most existing codebook designs for RIS are not tailored for active sensing, by which we mean the choice of the next codeword should depend on the measurements made so far, and the sequence of codewords should dynamically focus reflection toward the user. Moreover, most existing codeword selection methods rely on exhaustive search in beam training to identify the codeword with the highest signal-to-noise ratio (SNR), thus incurring substantial pilot overhead as the size of the codebook scales. This paper proposes learning-based approaches for codebook construction and for codeword selection for active sensing. The proposed learning approach aims to locate a target in the service area by recursively selecting a sequence of BS beamforming codewords and RIS codewords from the respective codebooks as more measurements become available without exhaustive beam training. The codebook design and the codeword selection fuse key ideas from the vector quantized-variational autoencoder (VQ-VAE) and the long short-term memory (LSTM) network to learn respectively the discrete function space of the codebook and the temporal dependencies between measurements.
Localization with Reconfigurable Intelligent Surface: An Active Sensing Approach
Dec 15, 2023This paper addresses an uplink localization problem in which a base station (BS) aims to locate a remote user with the help of reconfigurable intelligent surfaces (RISs). We propose a strategy in which the user transmits pilots sequentially and the BS adaptively adjusts the sensing vectors, including the BS beamforming vector and multiple RIS reflection coefficients based on the observations already made, to eventually produce an estimated user position. This is a challenging active sensing problem for which finding an optimal solution involves searching through a complicated functional space whose dimension increases with the number of measurements. We show that the long short-term memory (LSTM) network can be used to exploit the latent temporal correlation between measurements to automatically construct scalable state vectors. Subsequently, the state vector is mapped to the sensing vectors for the next time frame via a deep neural network (DNN). A final DNN is used to map the state vector to the estimated user position. Numerical result illustrates the advantage of the active sensing design as compared to non-active sensing methods. The proposed solution produces interpretable results and is generalizable in the number of sensing stages. Remarkably, we show that a network with one BS and multiple RISs can outperform a comparable setting with multiple BSs.
Active Sensing for Localization with Reconfigurable Intelligent Surface
Oct 19, 2023This paper addresses an uplink localization problem in which the base station (BS) aims to locate a remote user with the aid of reconfigurable intelligent surface (RIS). This paper proposes a strategy in which the user transmits pilots over multiple time frames, and the BS adaptively adjusts the RIS reflection coefficients based on the observations already received so far in order to produce an accurate estimate of the user location at the end. This is a challenging active sensing problem for which finding an optimal solution involves a search through a complicated functional space whose dimension increases with the number of measurements. In this paper, we show that the long short-term memory (LSTM) network can be used to exploit the latent temporal correlation between measurements to automatically construct scalable information vectors (called hidden state) based on the measurements. Subsequently, the state vector can be mapped to the RIS configuration for the next time frame in a codebook-free fashion via a deep neural network (DNN). After all the measurements have been received, a final DNN can be used to map the LSTM cell state to the estimated user equipment (UE) position. Numerical result shows that the proposed active RIS design results in lower localization error as compared to existing active and nonactive methods. The proposed solution produces interpretable results and is generalizable to early stopping in the sequence of sensing stages.
Learning Based User Scheduling in Reconfigurable Intelligent Surface Assisted Multiuser Downlink
May 12, 2022

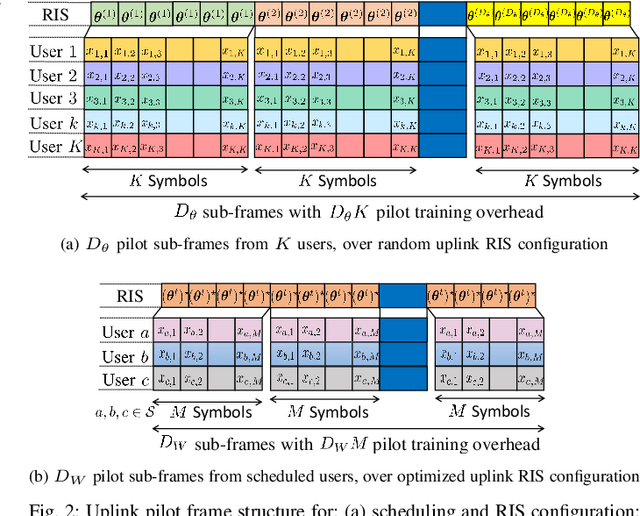
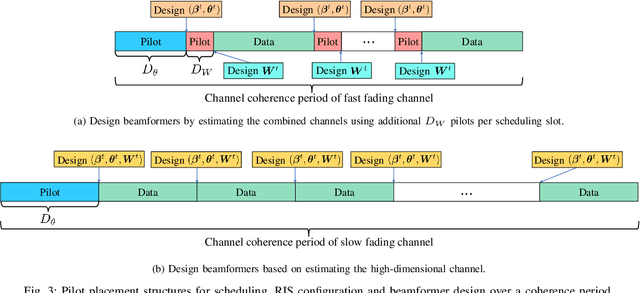
Reconfigurable intelligent surface (RIS) is capable of intelligently manipulating the phases of the incident electromagnetic wave to improve the wireless propagation environment between the base-station (BS) and the users. This paper addresses the joint user scheduling, RIS configuration, and BS beamforming problem in an RIS-assisted downlink network with limited pilot overhead. We show that graph neural networks (GNN) with permutation invariant and equivariant properties can be used to appropriately schedule users and to design RIS configurations to achieve high overall throughput while accounting for fairness among the users. As compared to the conventional methodology of first estimating the channels then optimizing the user schedule, RIS configuration and the beamformers, this paper shows that an optimized user schedule can be obtained directly from a very short set of pilots using a GNN, then the RIS configuration can be optimized using a second GNN, and finally the BS beamformers can be designed based on the overall effective channel. Numerical results show that the proposed approach can utilize the received pilots more efficiently than the conventional channel estimation based approach, and can generalize to systems with an arbitrary number of users.