 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGelTip: A Finger-shaped Optical Tactile Sensor for Robotic Manipulation
Aug 12, 2020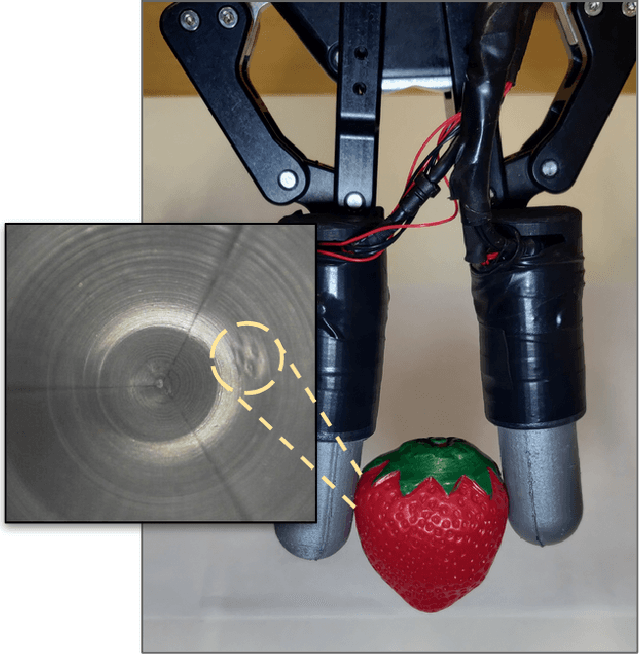
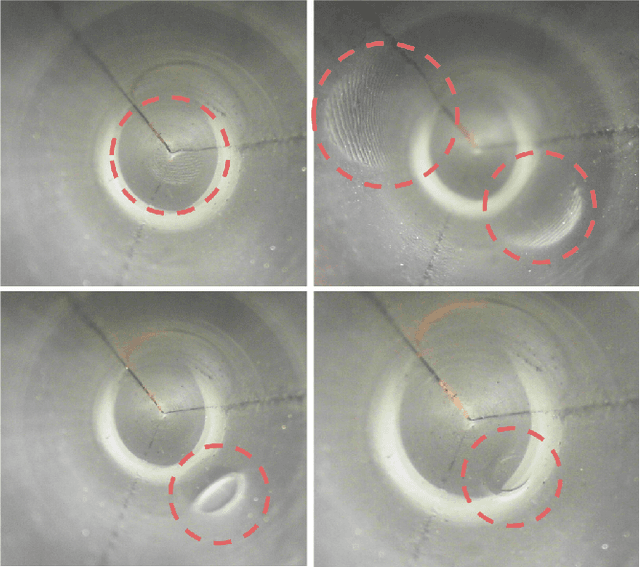
Sensing contacts throughout the fingers is an essential capability for a robot to perform manipulation tasks in cluttered environments. However, existing tactile sensors either only have a flat sensing surface or a compliant tip with a limited sensing area. In this paper, we propose a novel optical tactile sensor, the GelTip, that is shaped as a finger and can sense contacts on any location of its surface. The sensor captures high-resolution and color-invariant tactile images that can be exploited to extract detailed information about the end-effector's interactions against manipulated objects. Our extensive experiments show that the GelTip sensor can effectively localise the contacts on different locations of its finger-shaped body, with a small localisation error of approximately 5 mm, on average, and under 1 mm in the best cases. The obtained results show the potential of the GelTip sensor in facilitating dynamic manipulation tasks with its all-round tactile sensing capability. The sensor models and further information about the GelTip sensor can be found at http://danfergo.github.io/geltip.