 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge5G Network on Wings: A Deep Reinforcement Learning Approach to UAV-based Integrated Access and Backhaul
Feb 07, 2022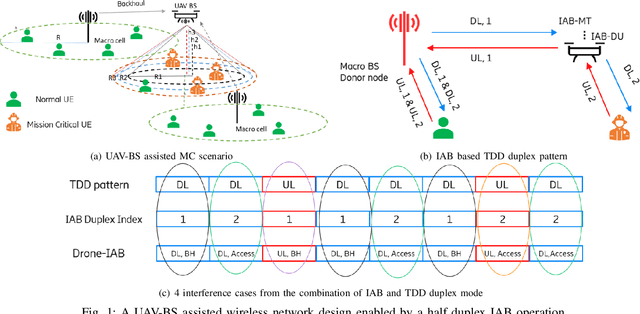
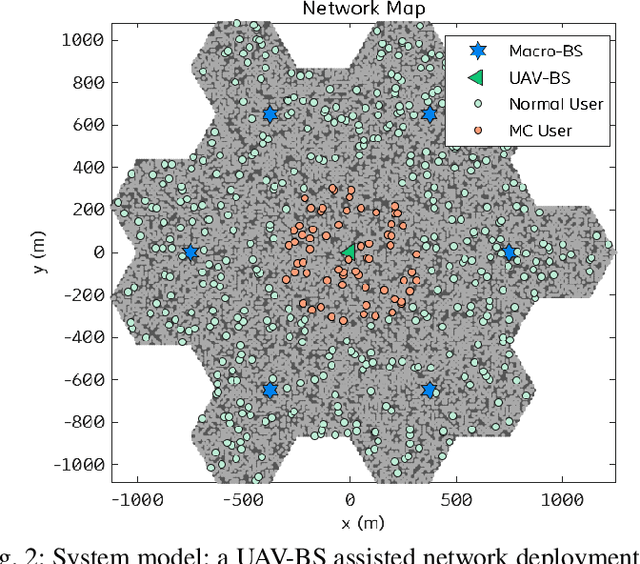
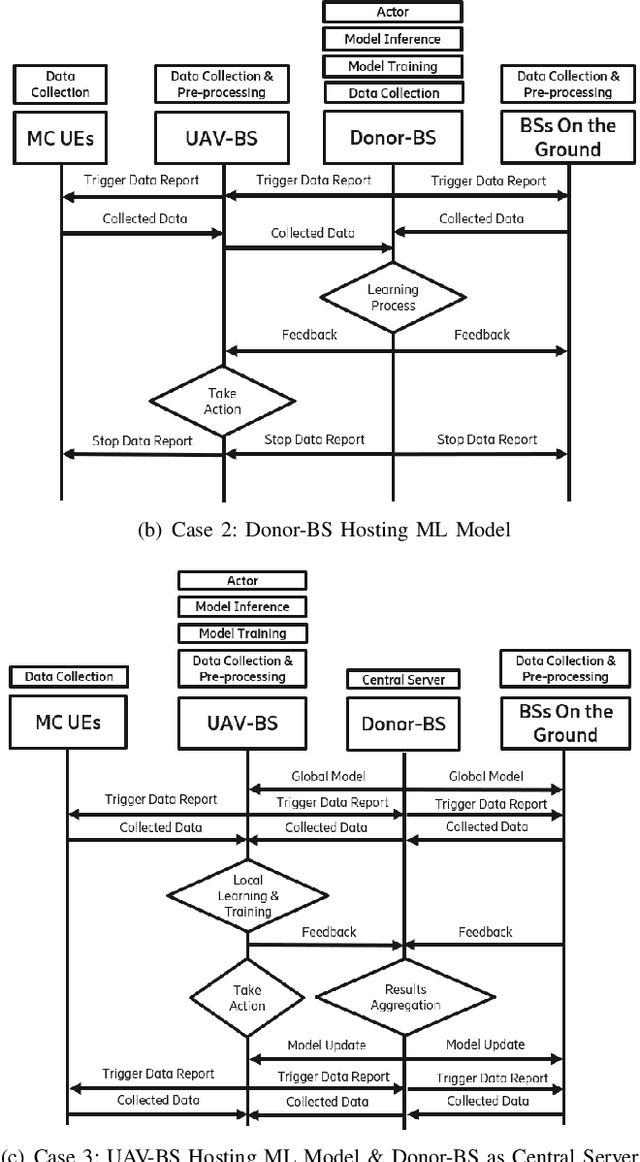
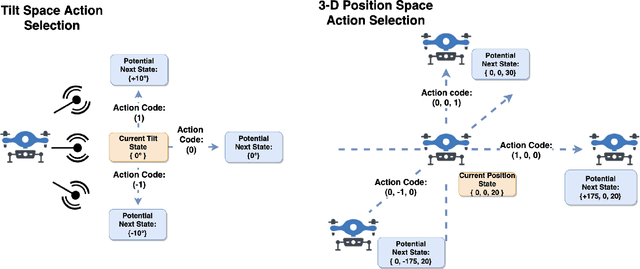
Fast and reliable wireless communication has become a critical demand in human life. When natural disasters strike, providing ubiquitous connectivity becomes challenging by using traditional wireless networks. In this context, unmanned aerial vehicle (UAV) based aerial networks offer a promising alternative for fast, flexible, and reliable wireless communications in mission-critical (MC) scenarios. Due to the unique characteristics such as mobility, flexible deployment, and rapid reconfiguration, drones can readily change location dynamically to provide on-demand communications to users on the ground in emergency scenarios. As a result, the usage of UAV base stations (UAV-BSs) has been considered as an appropriate approach for providing rapid connection in MC scenarios. In this paper, we study how to control a UAV-BS in both static and dynamic environments. We investigate a situation in which a macro BS is destroyed as a result of a natural disaster and a UAV-BS is deployed using integrated access and backhaul (IAB) technology to provide coverage for users in the disaster area. We present a data collection system, signaling procedures and machine learning applications for this use case. A deep reinforcement learning algorithm is developed to jointly optimize the tilt of the access and backhaul antennas of the UAV-BS as well as its three-dimensional placement. Evaluation results show that the proposed algorithm can autonomously navigate and configure the UAV-BS to satisfactorily serve the MC users on the ground.
Autonomous Navigation and Configuration of Integrated Access Backhauling for UAV Base Station Using Reinforcement Learning
Dec 14, 2021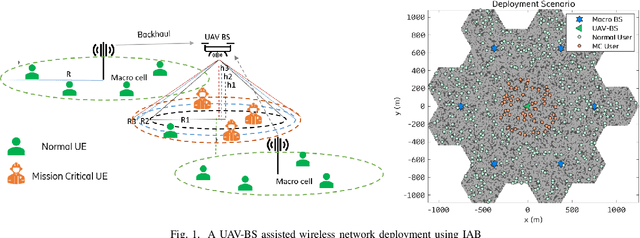
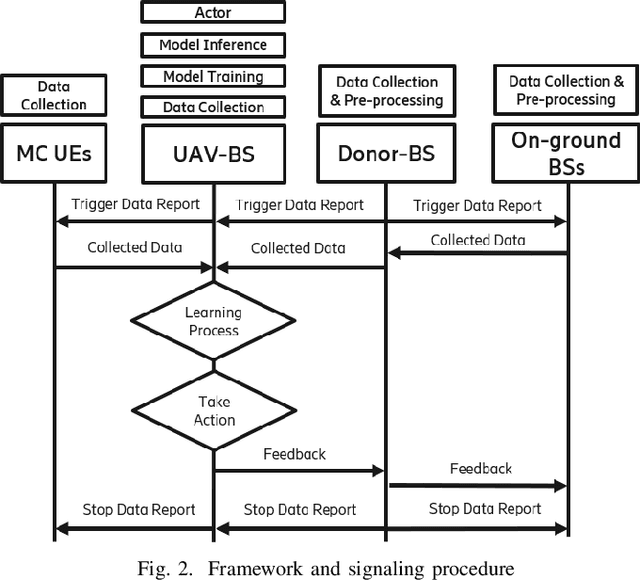
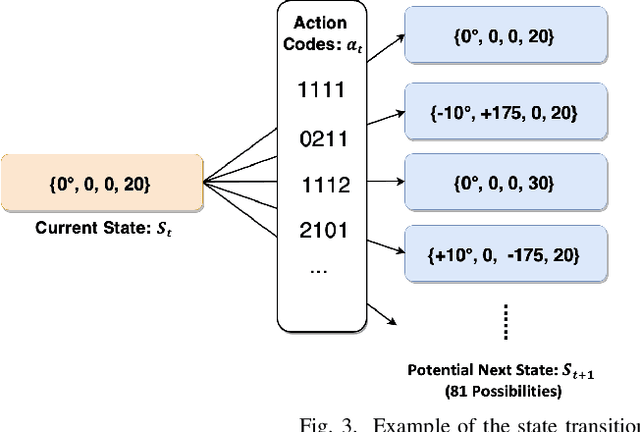
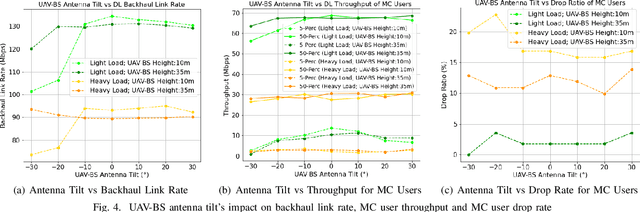
Fast and reliable connectivity is essential to enhancing situational awareness and operational efficiency for public safety mission-critical (MC) users. In emergency or disaster circumstances, where existing cellular network coverage and capacity may not be available to meet MC communication demands, deployable-network-based solutions such as cells-on-wheels/wings can be utilized swiftly to ensure reliable connection for MC users. In this paper, we consider a scenario where a macro base station (BS) is destroyed due to a natural disaster and an unmanned aerial vehicle carrying BS (UAV-BS) is set up to provide temporary coverage for users in the disaster area. The UAV-BS is integrated into the mobile network using the 5G integrated access and backhaul (IAB) technology. We propose a framework and signalling procedure for applying machine learning to this use case. A deep reinforcement learning algorithm is designed to jointly optimize the access and backhaul antenna tilt as well as the three-dimensional location of the UAV-BS in order to best serve the on-ground MC users while maintaining a good backhaul connection. Our result shows that the proposed algorithm can autonomously navigate and configure the UAV-BS to improve the throughput and reduce the drop rate of MC users.
Deployable Networks for Public Safety in 5G and Beyond: A Coverage and Interference Study
Sep 09, 2021
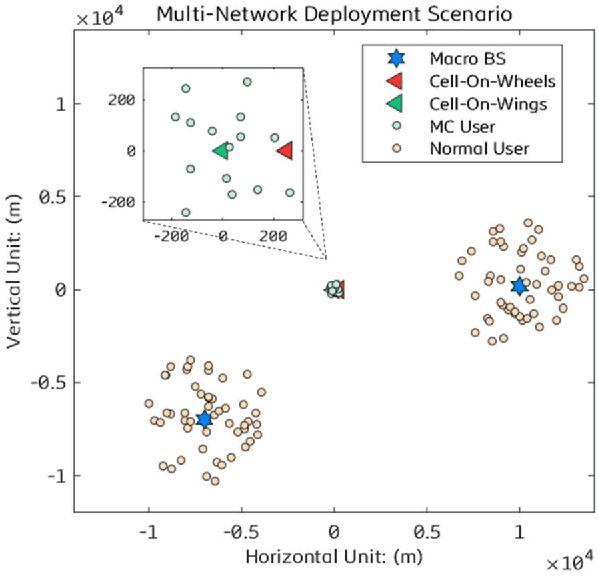

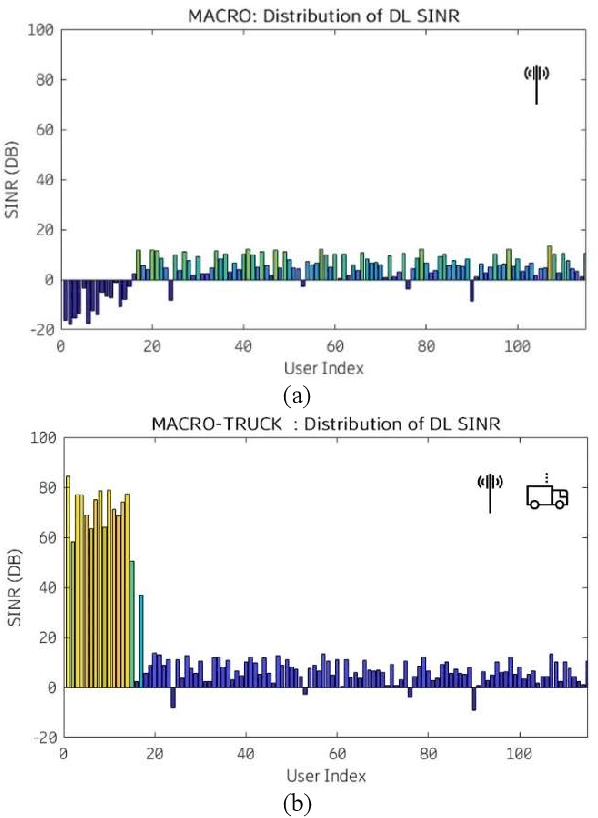
Deployable networks are foreseen to be one of the key technologies for public safety in fifth generation (5G) mobile communications and beyond. They can be used to complement the existing public cellular networks to provide temporary and on-demand connectivity in emergency situations. However, operating deployable networks in coexistence with public cellular networks can be challenging from an interference perspective. To gain insights on the deployment strategy for deployable networks, in this article, we present an extensive numerical study of coverage and interference analysis, considering four different co-existence scenarios and different types of deployable base stations (BSs), i.e., BS on a truck and BS on an Unmanned Aerial Vehicle (UAV). Our simulation results show that deploying deployable BSs in rural scenarios can provide good coverage to meet the service requirement for mission critical (MC) users. In addition, the interference impact is only substantial when the deployable and public networks are close to each other. Finally, allowing the MC users to access the public network can be of vital importance to guarantee their service when the interference level between public and deployable network is very high.