 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge5G Network on Wings: A Deep Reinforcement Learning Approach to UAV-based Integrated Access and Backhaul
Paper and Code
Feb 07, 2022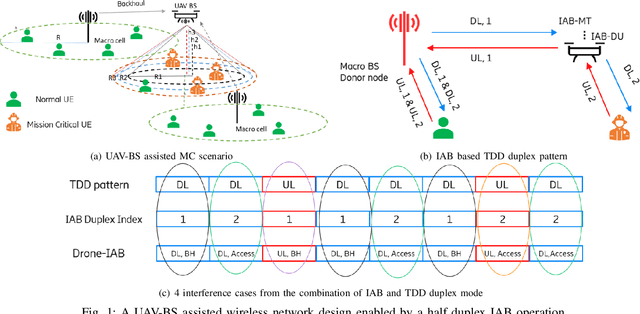
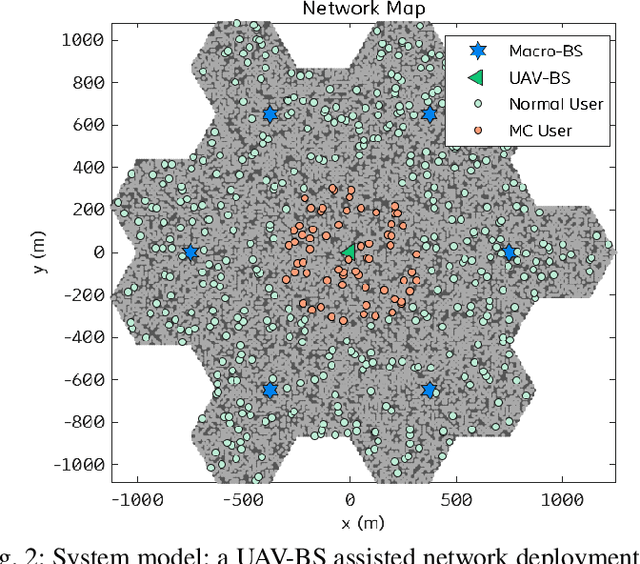
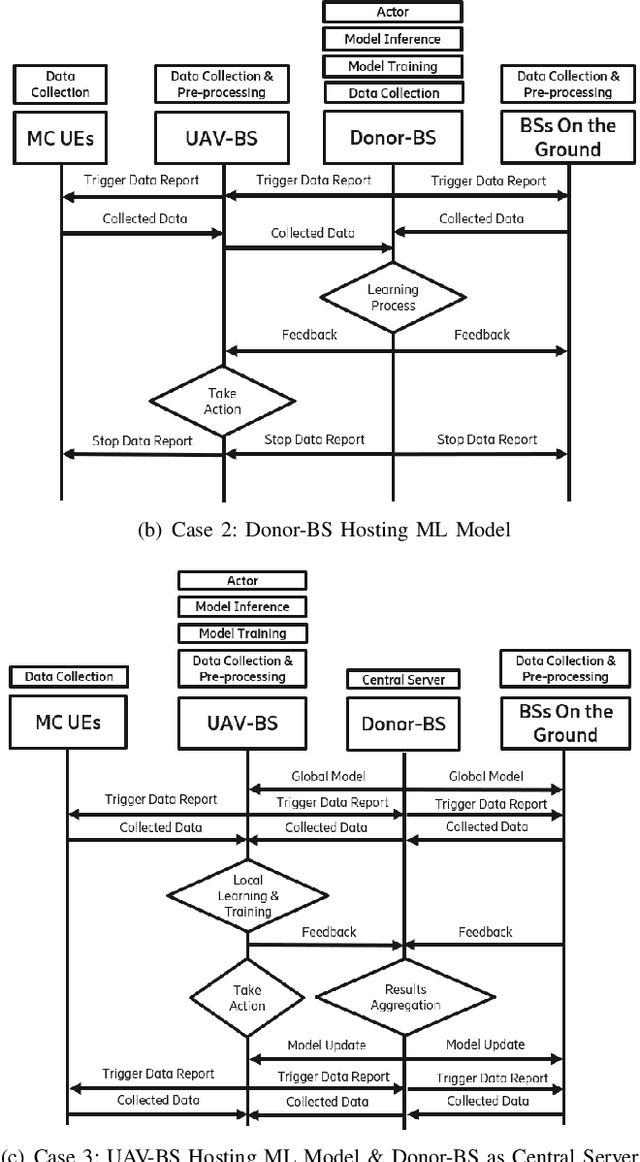
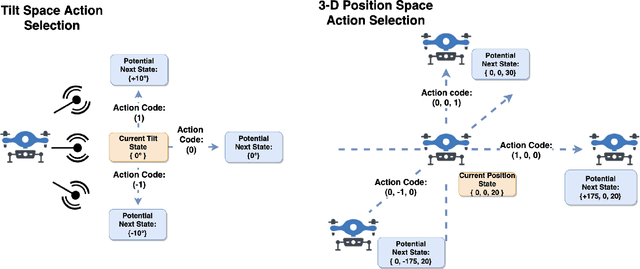
Fast and reliable wireless communication has become a critical demand in human life. When natural disasters strike, providing ubiquitous connectivity becomes challenging by using traditional wireless networks. In this context, unmanned aerial vehicle (UAV) based aerial networks offer a promising alternative for fast, flexible, and reliable wireless communications in mission-critical (MC) scenarios. Due to the unique characteristics such as mobility, flexible deployment, and rapid reconfiguration, drones can readily change location dynamically to provide on-demand communications to users on the ground in emergency scenarios. As a result, the usage of UAV base stations (UAV-BSs) has been considered as an appropriate approach for providing rapid connection in MC scenarios. In this paper, we study how to control a UAV-BS in both static and dynamic environments. We investigate a situation in which a macro BS is destroyed as a result of a natural disaster and a UAV-BS is deployed using integrated access and backhaul (IAB) technology to provide coverage for users in the disaster area. We present a data collection system, signaling procedures and machine learning applications for this use case. A deep reinforcement learning algorithm is developed to jointly optimize the tilt of the access and backhaul antennas of the UAV-BS as well as its three-dimensional placement. Evaluation results show that the proposed algorithm can autonomously navigate and configure the UAV-BS to satisfactorily serve the MC users on the ground.