 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparseTT: Visual Tracking with Sparse Transformers
May 08, 2022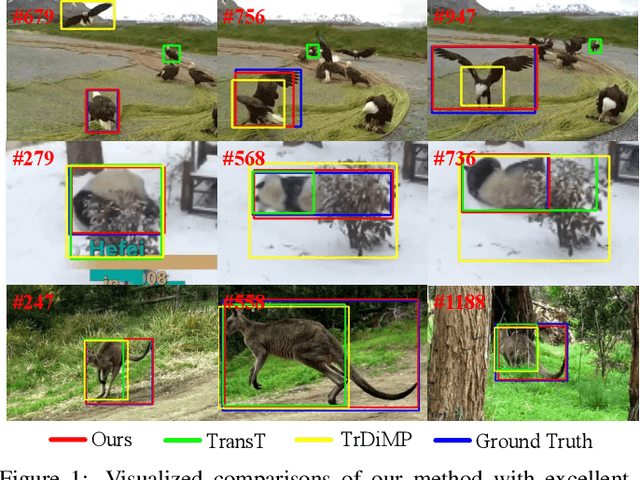
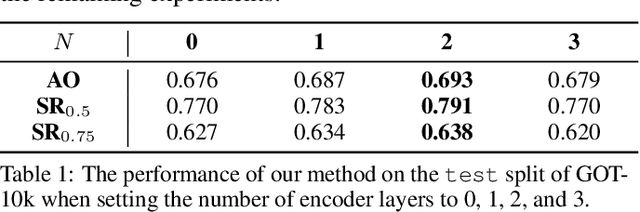
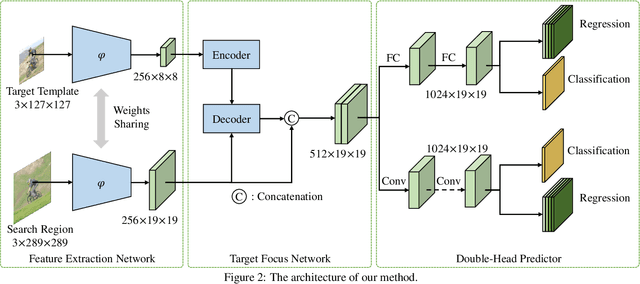
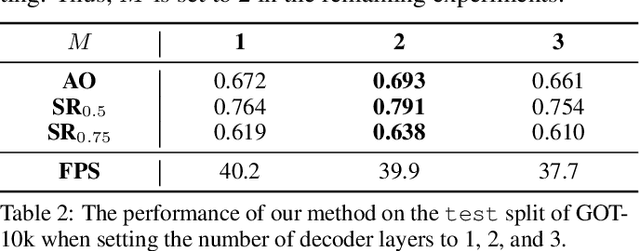
Transformers have been successfully applied to the visual tracking task and significantly promote tracking performance. The self-attention mechanism designed to model long-range dependencies is the key to the success of Transformers. However, self-attention lacks focusing on the most relevant information in the search regions, making it easy to be distracted by background. In this paper, we relieve this issue with a sparse attention mechanism by focusing the most relevant information in the search regions, which enables a much accurate tracking. Furthermore, we introduce a double-head predictor to boost the accuracy of foreground-background classification and regression of target bounding boxes, which further improve the tracking performance. Extensive experiments show that, without bells and whistles, our method significantly outperforms the state-of-the-art approaches on LaSOT, GOT-10k, TrackingNet, and UAV123, while running at 40 FPS. Notably, the training time of our method is reduced by 75% compared to that of TransT. The source code and models are available at https://github.com/fzh0917/SparseTT.
STMTrack: Template-free Visual Tracking with Space-time Memory Networks
Apr 02, 2021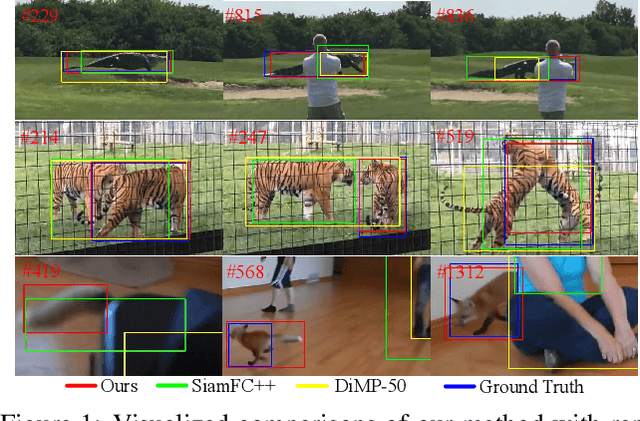
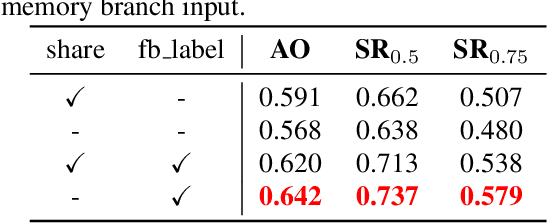
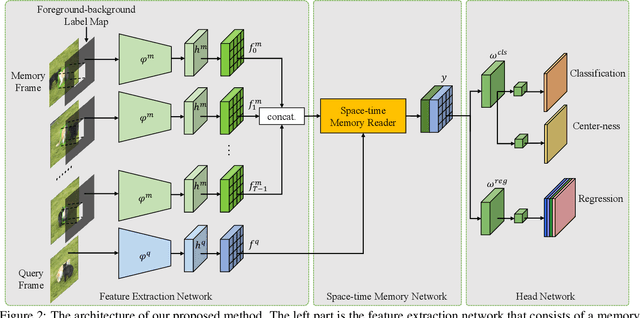
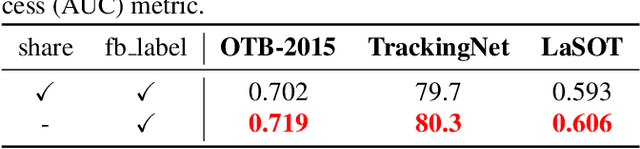
Boosting performance of the offline trained siamese trackers is getting harder nowadays since the fixed information of the template cropped from the first frame has been almost thoroughly mined, but they are poorly capable of resisting target appearance changes. Existing trackers with template updating mechanisms rely on time-consuming numerical optimization and complex hand-designed strategies to achieve competitive performance, hindering them from real-time tracking and practical applications. In this paper, we propose a novel tracking framework built on top of a space-time memory network that is competent to make full use of historical information related to the target for better adapting to appearance variations during tracking. Specifically, a novel memory mechanism is introduced, which stores the historical information of the target to guide the tracker to focus on the most informative regions in the current frame. Furthermore, the pixel-level similarity computation of the memory network enables our tracker to generate much more accurate bounding boxes of the target. Extensive experiments and comparisons with many competitive trackers on challenging large-scale benchmarks, OTB-2015, TrackingNet, GOT-10k, LaSOT, UAV123, and VOT2018, show that, without bells and whistles, our tracker outperforms all previous state-of-the-art real-time methods while running at 37 FPS. The code is available at https://github.com/fzh0917/STMTrack.