 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFactorized Inference in Deep Markov Models for Incomplete Multimodal Time Series
May 30, 2019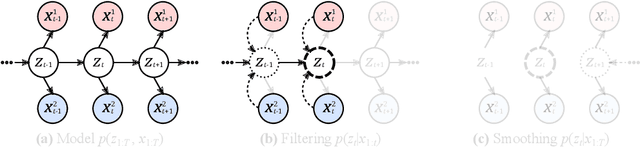
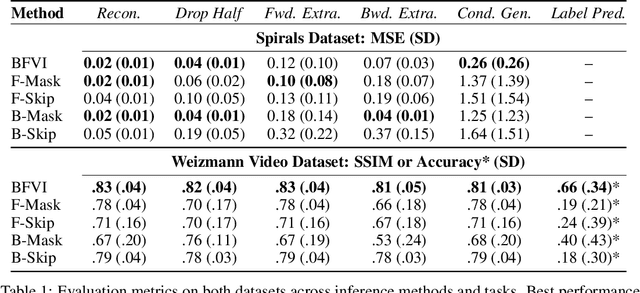
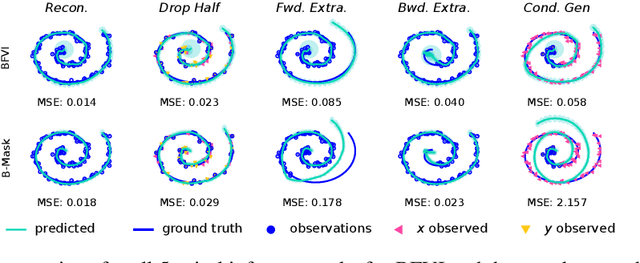
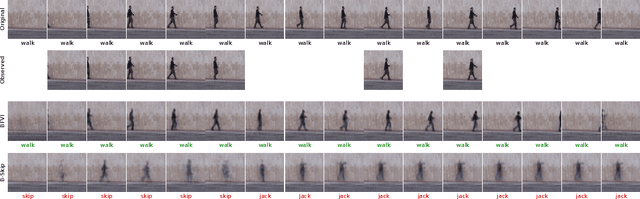
Integrating deep learning with latent state space models has the potential to yield temporal models that are powerful, yet tractable and interpretable. Unfortunately, current models are not designed to handle missing data or multiple data modalities, which are both prevalent in real-world data. In this work, we introduce a factorized inference method for Multimodal Deep Markov Models (MDMMs), allowing us to filter and smooth in the presence of missing data, while also performing uncertainty-aware multimodal fusion. We derive this method by factorizing the posterior p(z|x) for non-linear state space models, and develop a variational backward-forward algorithm for inference. Because our method handles incompleteness over both time and modalities, it is capable of interpolation, extrapolation, conditional generation, and label prediction in multimodal time series. We demonstrate these capabilities on both synthetic and real-world multimodal data under high levels of data deletion. Our method performs well even with more than 50% missing data, and outperforms existing deep approaches to inference in latent time series.
That's Mine! Learning Ownership Relations and Norms for Robots
Jan 10, 2019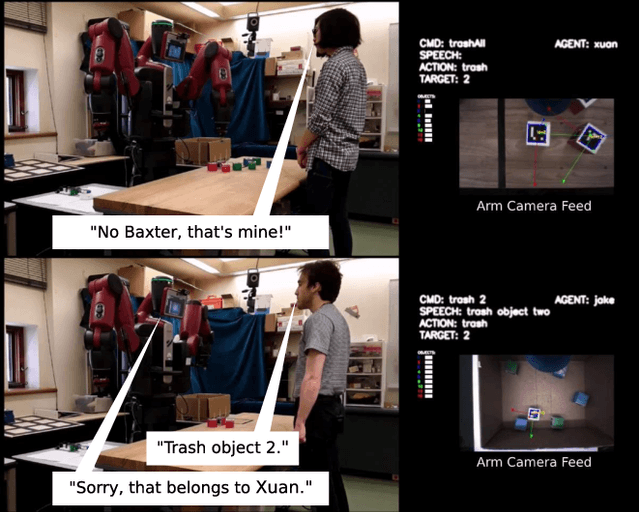
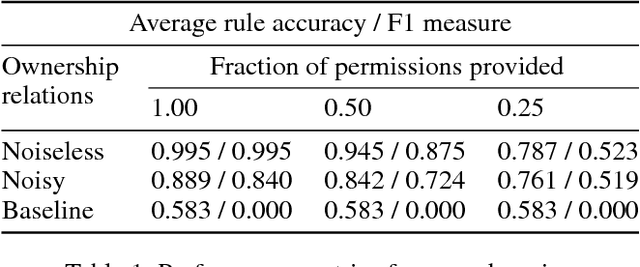
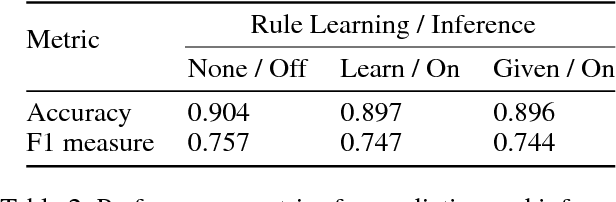
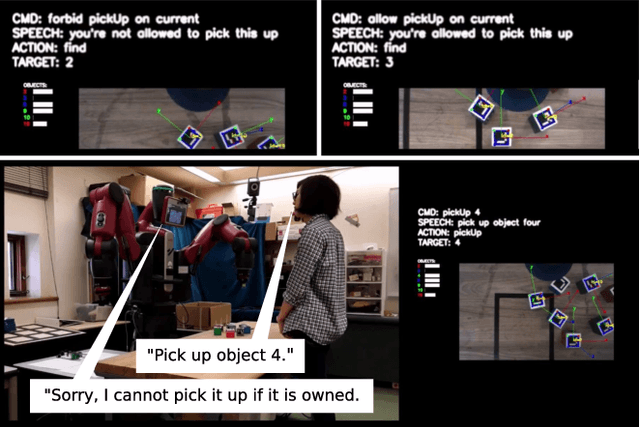
The ability for autonomous agents to learn and conform to human norms is crucial for their safety and effectiveness in social environments. While recent work has led to frameworks for the representation and inference of simple social rules, research into norm learning remains at an exploratory stage. Here, we present a robotic system capable of representing, learning, and inferring ownership relations and norms. Ownership is represented as a graph of probabilistic relations between objects and their owners, along with a database of predicate-based norms that constrain the actions permissible on owned objects. To learn these norms and relations, our system integrates (i) a novel incremental norm learning algorithm capable of both one-shot learning and induction from specific examples, (ii) Bayesian inference of ownership relations in response to apparent rule violations, and (iii) percept-based prediction of an object's likely owners. Through a series of simulated and real-world experiments, we demonstrate the competence and flexibility of the system in performing object manipulation tasks that require a variety of norms to be followed, laying the groundwork for future research into the acquisition and application of social norms.