 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRBA-FE: A Robust Brain-Inspired Audio Feature Extractor for Depression Diagnosis
Jun 08, 2025This article proposes a robust brain-inspired audio feature extractor (RBA-FE) model for depression diagnosis, using an improved hierarchical network architecture. Most deep learning models achieve state-of-the-art performance for image-based diagnostic tasks, ignoring the counterpart audio features. In order to tailor the noise challenge, RBA-FE leverages six acoustic features extracted from the raw audio, capturing both spatial characteristics and temporal dependencies. This hybrid attribute helps alleviate the precision limitation in audio feature extraction within other learning models like deep residual shrinkage networks. To deal with the noise issues, our model incorporates an improved spiking neuron model, called adaptive rate smooth leaky integrate-and-fire (ARSLIF). The ARSLIF model emulates the mechanism of ``retuning of cellular signal selectivity" in the brain attention systems, which enhances the model robustness against environmental noises in audio data. Experimental results demonstrate that RBA-FE achieves state-of-the-art accuracy on the MODMA dataset, respectively with 0.8750, 0.8974, 0.8750 and 0.8750 in precision, accuracy, recall and F1 score. Extensive experiments on the AVEC2014 and DAIC-WOZ datasets both show enhancements in noise robustness. It is further indicated by comparison that the ARSLIF neuron model suggest the abnormal firing pattern within the feature extraction on depressive audio data, offering brain-inspired interpretability.
A brain-inspired generative model for EEG-based cognitive state identification
May 03, 2025This article proposes a brain-inspired generative (BIG) model that merges an impulsive-attention neural network and a variational autoencoder (VAE) for identifying cognitive states based on electroencephalography (EEG) data. A hybrid learning method is presented for training the model by integrating gradient-based learning and heteroassociative memory. The BIG model is capable of achieving multi-task objectives: classification, generating new EEG, and brain network interpretation, alleviating the limitations of excessive data training and high computational cost in conventional approaches. Experimental results on two public EEG datasets demonstrate that the BIG model achieves a classification accuracy above 89\%, comparable with state-of-the-art methods, while reducing computational cost by nearly 11\% over the baseline EEGNet. Incorporating the generated EEG data for training, the BIG model exhibits comparative performance in a few-shot pattern.Ablation studies justify the poised brain-inspired characteristic regarding the impulsive-attention module and the hybrid learning method. Thanks to the performance advantages with interpretable outputs, this BIG model has application potential for building digital twins of the brain.
ISAM-MTL: Cross-subject multi-task learning model with identifiable spikes and associative memory networks
Jan 30, 2025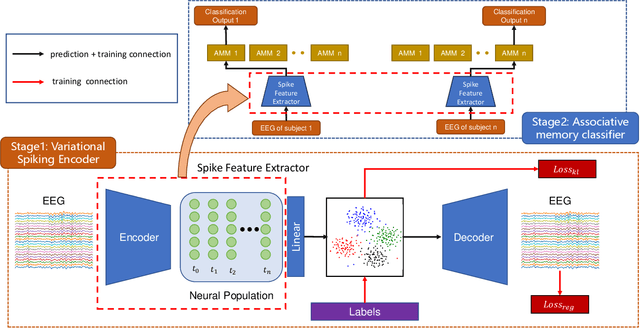
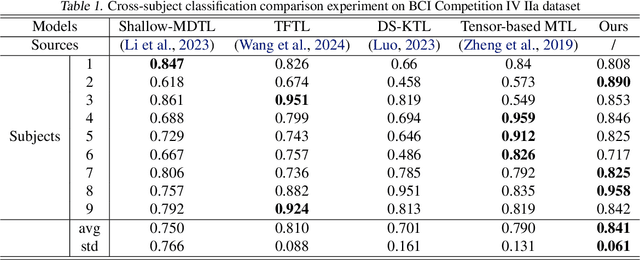
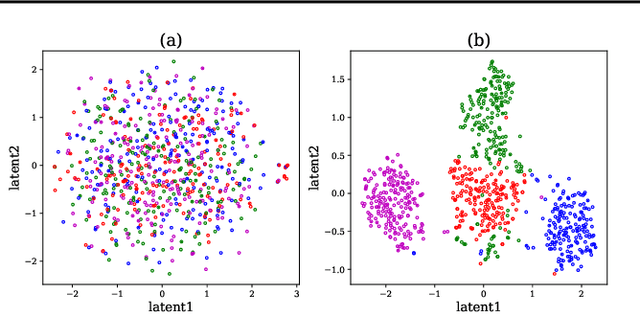
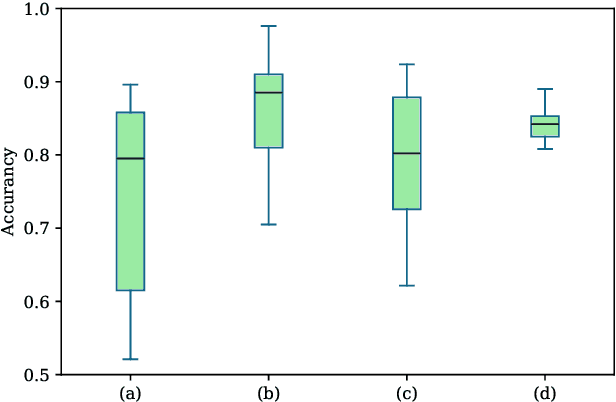
Cross-subject variability in EEG degrades performance of current deep learning models, limiting the development of brain-computer interface (BCI). This paper proposes ISAM-MTL, which is a multi-task learning (MTL) EEG classification model based on identifiable spiking (IS) representations and associative memory (AM) networks. The proposed model treats EEG classification of each subject as an independent task and leverages cross-subject data training to facilitate feature sharing across subjects. ISAM-MTL consists of a spiking feature extractor that captures shared features across subjects and a subject-specific bidirectional associative memory network that is trained by Hebbian learning for efficient and fast within-subject EEG classification. ISAM-MTL integrates learned spiking neural representations with bidirectional associative memory for cross-subject EEG classification. The model employs label-guided variational inference to construct identifiable spike representations, enhancing classification accuracy. Experimental results on two BCI Competition datasets demonstrate that ISAM-MTL improves the average accuracy of cross-subject EEG classification while reducing performance variability among subjects. The model further exhibits the characteristics of few-shot learning and identifiable neural activity beneath EEG, enabling rapid and interpretable calibration for BCI systems.
AM-MTEEG: Multi-task EEG classification based on impulsive associative memory
Sep 27, 2024



Electroencephalogram-based brain-computer interface (BCI) has potential applications in various fields, but their development is hindered by limited data and significant cross-individual variability. Inspired by the principles of learning and memory in the human hippocampus, we propose a multi-task (MT) classification model, called AM-MTEEG, which combines learning-based impulsive neural representations with bidirectional associative memory (AM) for cross-individual BCI classification tasks. The model treats the EEG classification of each individual as an independent task and facilitates feature sharing across individuals. Our model consists of an impulsive neural population coupled with a convolutional encoder-decoder to extract shared features and a bidirectional associative memory matrix to map features to class. Experimental results in two BCI competition datasets show that our model improves average accuracy compared to state-of-the-art models and reduces performance variance across individuals, and the waveforms reconstructed by the bidirectional associative memory provide interpretability for the model's classification results. The neuronal firing patterns in our model are highly coordinated, similarly to the neural coding of hippocampal neurons, indicating that our model has biological similarities.
Distributed controller-estimator for target tracking of networked robotic systems under sampled interaction
May 27, 2016



This paper investigates the target tracking problem for networked robotic systems (NRSs) under sampled interaction. The target is assumed to be time-varying and described by a second-order oscillator. Two novel distributed controller-estimator algorithms (DCEA), which consist of both continuous and discontinuous signals, are presented. Based on the properties of small-value norms and Lyapunov stability theory, the conditions on the interaction topology, the sampling period, and the other control parameters are given such that the practical stability of the tracking error is achieved and the stability region is regulated quantitatively. The advantages of the presented DCEA are illustrated by comparisons with each other and the existing coordination algorithms. Simulation examples are given to demonstrate the theoretical results.
* 8 pages, 4 figures, Published in Automatica