 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Modality Attentive Feature Fusion for Object Detection in Multispectral Remote Sensing Imagery
Dec 06, 2021
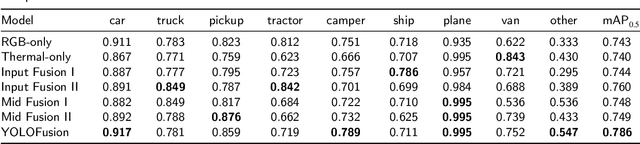
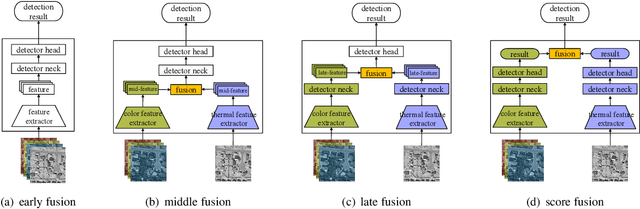

Cross-modality fusing complementary information of multispectral remote sensing image pairs can improve the perception ability of detection algorithms, making them more robust and reliable for a wider range of applications, such as nighttime detection. Compared with prior methods, we think different features should be processed specifically, the modality-specific features should be retained and enhanced, while the modality-shared features should be cherry-picked from the RGB and thermal IR modalities. Following this idea, a novel and lightweight multispectral feature fusion approach with joint common-modality and differential-modality attentions are proposed, named Cross-Modality Attentive Feature Fusion (CMAFF). Given the intermediate feature maps of RGB and IR images, our module parallel infers attention maps from two separate modalities, common- and differential-modality, then the attention maps are multiplied to the input feature map respectively for adaptive feature enhancement or selection. Extensive experiments demonstrate that our proposed approach can achieve the state-of-the-art performance at a low computation cost.
A One-Shot Texture-Perceiving Generative Adversarial Network for Unsupervised Surface Inspection
Jun 12, 2021

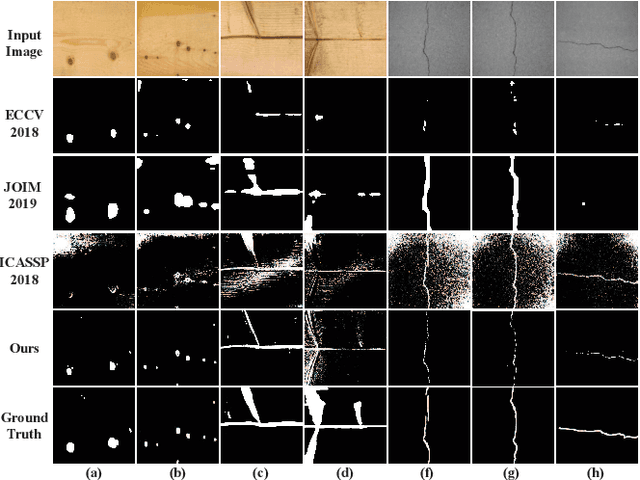
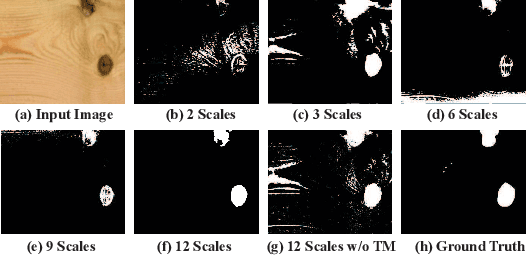
Visual surface inspection is a challenging task owing to the highly diverse appearance of target surfaces and defective regions. Previous attempts heavily rely on vast quantities of training examples with manual annotation. However, in some practical cases, it is difficult to obtain a large number of samples for inspection. To combat it, we propose a hierarchical texture-perceiving generative adversarial network (HTP-GAN) that is learned from the one-shot normal image in an unsupervised scheme. Specifically, the HTP-GAN contains a pyramid of convolutional GANs that can capture the global structure and fine-grained representation of an image simultaneously. This innovation helps distinguishing defective surface regions from normal ones. In addition, in the discriminator, a texture-perceiving module is devised to capture the spatially invariant representation of normal image via directional convolutions, making it more sensitive to defective areas. Experiments on a variety of datasets consistently demonstrate the effectiveness of our method.
Multi-robot Cooperative Object Transportation using Decentralized Deep Reinforcement Learning
Jul 17, 2020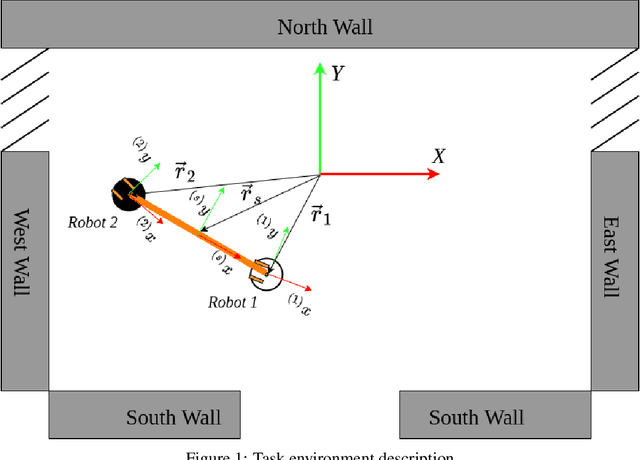
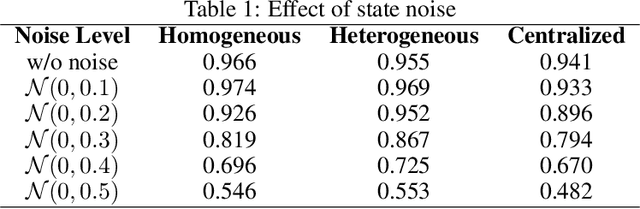
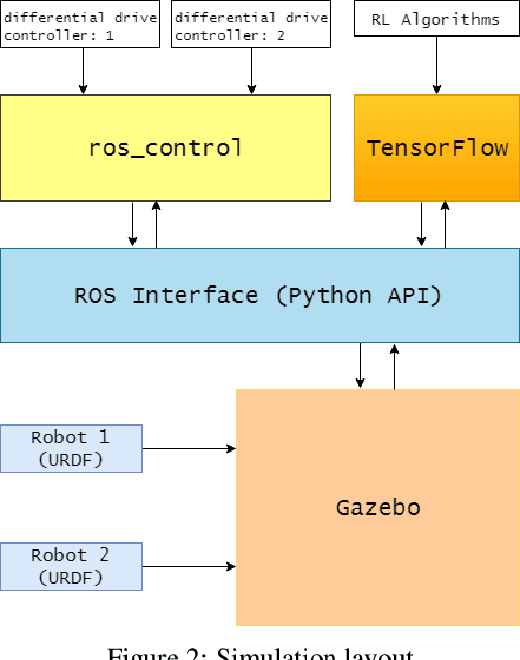
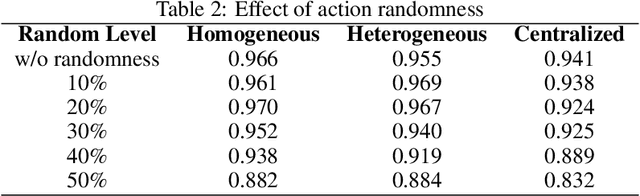
Object transportation could be a challenging problem for a single robot due to the oversize and/or overweight issues. A multi-robot system can take the advantage of increased driving power and more flexible configuration to solve such a problem. However, increased number of individuals also changed the dynamics of the system which makes control of a multi-robot system more complicated. Even worse, if the whole system is sitting on a centralized decision making unit, the data flow could be easily overloaded due to the upscaling of the system. In this research, we propose a decentralized control scheme on a multi-robot system with each individual equipped with a deep Q-network (DQN) controller to perform an oversized object transportation task. DQN is a deep reinforcement learning algorithm thus does not require the knowledge of system dynamics, instead, it enables the robots to learn appropriate control strategies through trial-and-error style interactions within the task environment. Since analogous controllers are distributed on the individuals, the computational bottleneck is avoided systematically. We demonstrate such a system in a scenario of carrying an oversized rod through a doorway by a two-robot team. The presented multi-robot system learns abstract features of the task and cooperative behaviors are observed. The decentralized DQN-style controller is showing strong robustness against uncertainties. In addition, We propose a universal metric to assess the cooperation quantitatively.