 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Label Error Detection: A Bayesian Approach to Mislabeled Data Detection
Jan 15, 2026Machine learning classification systems are susceptible to poor performance when trained with incorrect ground truth labels, even when data is well-curated by expert annotators. As machine learning becomes more widespread, it is increasingly imperative to identify and correct mislabeling to develop more powerful models. In this work, we motivate and describe Adaptive Label Error Detection (ALED), a novel method of detecting mislabeling. ALED extracts an intermediate feature space from a deep convolutional neural network, denoises the features, models the reduced manifold of each class with a multidimensional Gaussian distribution, and performs a simple likelihood ratio test to identify mislabeled samples. We show that ALED has markedly increased sensitivity, without compromising precision, compared to established label error detection methods, on multiple medical imaging datasets. We demonstrate an example where fine-tuning a neural network on corrected data results in a 33.8% decrease in test set errors, providing strong benefits to end users. The ALED detector is deployed in the Python package statlab.
A Simple Sparse Matrix Vector Multiplication Approach to Padded Convolution
Nov 29, 2024
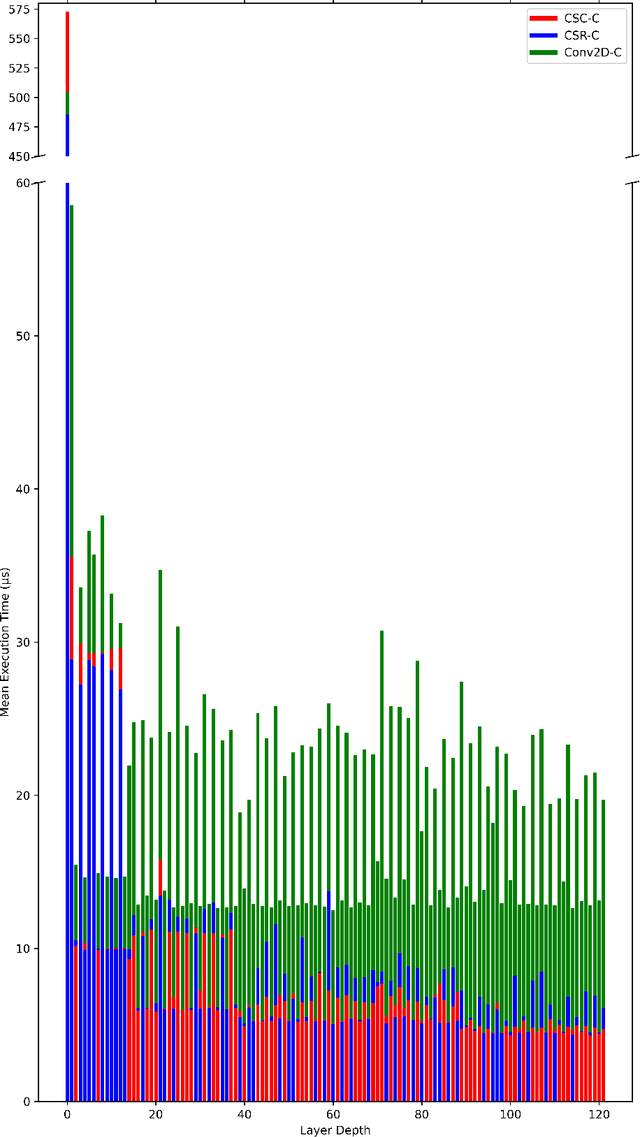


We introduce an algorithm for efficiently representing convolution with zero-padding and stride as a sparse transformation matrix, applied to a vectorized input through sparse matrix-vector multiplication (SpMV). We provide a theoretical contribution with an explicit expression for the number of non-zero multiplications in convolutions with stride and padding, offering insight into the potential for leveraging sparsity in convolution operations. A proof-of-concept implementation is presented in Python, demonstrating the performance of our method on both CPU and GPU architectures. This work contributes to the broader exploration of sparse matrix techniques in convolutional algorithms, with a particular focus on leveraging matrix multiplications for parallelization. Our findings lay the groundwork for future advancements in exploiting sparsity to improve the efficiency of convolution operations in fields such as machine learning and signal processing.
Invariant neuromorphic representations of tactile stimuli improve robustness of a real-time texture classification system
Nov 26, 2024



Humans have an exquisite sense of touch which robotic and prosthetic systems aim to recreate. We developed algorithms to create neuron-like (neuromorphic) spiking representations of texture that are invariant to the scanning speed and contact force applied in the sensing process. The spiking representations are based on mimicking activity from mechanoreceptors in human skin and further processing up to the brain. The neuromorphic encoding process transforms analog sensor readings into speed and force invariant spiking representations in three sequential stages: the force invariance module (in the analog domain), the spiking activity encoding module (transforms from analog to spiking domain), and the speed invariance module (in the spiking domain). The algorithms were tested on a tactile texture dataset collected in 15 speed-force conditions. An offline texture classification system built on the invariant representations has higher classification accuracy, improved computational efficiency, and increased capability to identify textures explored in novel speed-force conditions. The speed invariance algorithm was adapted to a real-time human-operated texture classification system. Similarly, the invariant representations improved classification accuracy, computational efficiency, and capability to identify textures explored in novel conditions. The invariant representation is even more crucial in this context due to human imprecision which seems to the classification system as a novel condition. These results demonstrate that invariant neuromorphic representations enable better performing neurorobotic tactile sensing systems. Furthermore, because the neuromorphic representations are based on biological processing, this work can be used in the future as the basis for naturalistic sensory feedback for upper limb amputees.
ExpTest: Automating Learning Rate Searching and Tuning with Insights from Linearized Neural Networks
Nov 25, 2024



Hyperparameter tuning remains a significant challenge for the training of deep neural networks (DNNs), requiring manual and/or time-intensive grid searches, increasing resource costs and presenting a barrier to the democratization of machine learning. The global initial learning rate for DNN training is particularly important. Several techniques have been proposed for automated learning rate tuning during training; however, they still require manual searching for the global initial learning rate. Though methods exist that do not require this initial selection, they suffer from poor performance. Here, we present ExpTest, a sophisticated method for initial learning rate searching and subsequent learning rate tuning for the training of DNNs. ExpTest draws on insights from linearized neural networks and the form of the loss curve, which we treat as a real-time signal upon which we perform hypothesis testing. We mathematically justify ExpTest and provide empirical support. ExpTest requires minimal overhead, is robust to hyperparameter choice, and achieves state-of-the-art performance on a variety of tasks and architectures, without initial learning rate selection or learning rate scheduling.