 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralizing Segmentation Foundation Model Under Sim-to-real Domain-shift for Guidewire Segmentation in X-ray Fluoroscopy
Oct 09, 2024



Guidewire segmentation during endovascular interventions holds the potential to significantly enhance procedural accuracy, improving visualization and providing critical feedback that can support both physicians and robotic systems in navigating complex vascular pathways. Unlike supervised segmentation networks, which need many expensive expert-annotated labels, sim-to-real domain adaptation approaches utilize synthetic data from simulations, offering a cost-effective solution. The success of models like Segment-Anything (SAM) has driven advancements in image segmentation foundation models with strong zero/few-shot generalization through prompt engineering. However, they struggle with medical images like X-ray fluoroscopy and the domain-shifts of the data. Given the challenges of acquiring annotation and the accessibility of labeled simulation data, we propose a sim-to-real domain adaption framework with a coarse-to-fine strategy to adapt SAM to X-ray fluoroscopy guidewire segmentation without any annotation on the target domain. We first generate the pseudo-labels by utilizing a simple source image style transfer technique that preserves the guidewire structure. Then, we develop a weakly supervised self-training architecture to fine-tune an end-to-end student SAM with the coarse labels by imposing consistency regularization and supervision from the teacher SAM network. We validate the effectiveness of the proposed method on a publicly available Cardiac dataset and an in-house Neurovascular dataset, where our method surpasses both pre-trained SAM and many state-of-the-art domain adaptation techniques by a large margin. Our code will be made public on GitHub soon.
A Novel Aerial-Aquatic Locomotion Robot with Variable Stiffness Propulsion Module
Sep 15, 2024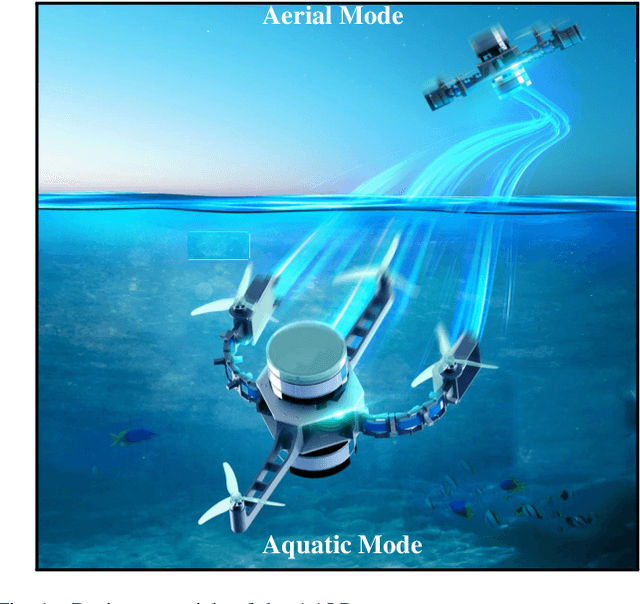
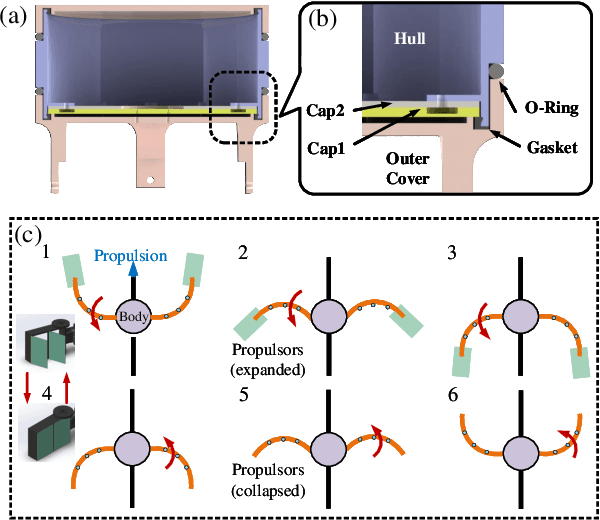
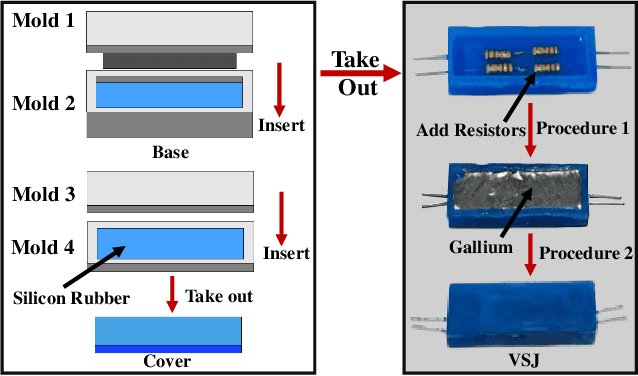
In recent years, the development of robots capable of operating in both aerial and aquatic environments has gained significant attention. This study presents the design and fabrication of a novel aerial-aquatic locomotion robot (AALR). Inspired by the diving beetle, the AALR incorporates a biomimetic propulsion mechanism with power and recovery strokes. The variable stiffness propulsion module (VSPM) uses low melting point alloy (LMPA) and variable stiffness joints (VSJ) to achieve efficient aquatic locomotion while reduce harm to marine life. The AALR's innovative design integrates the VSPM into the arms of a traditional quadrotor, allowing for effective aerial-aquatic locomotion. The VSPM adjusts joint stiffness through temperature control, meeting locomotion requirements in both aerial and aquatic modes. A dynamic model for the VSPM was developed, with optimized dimensional parameters to increase propulsion force. Experiments focused on aquatic mode analysis and demonstrated the AALR's swimming capability, achieving a maximum swimming speed of 77 mm/s underwater. The results confirm the AALR's effective performance in water environment, highlighting its potential for versatile, eco-friendly operations.