 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWheelPoser: Sparse-IMU Based Body Pose Estimation for Wheelchair Users
Sep 13, 2024
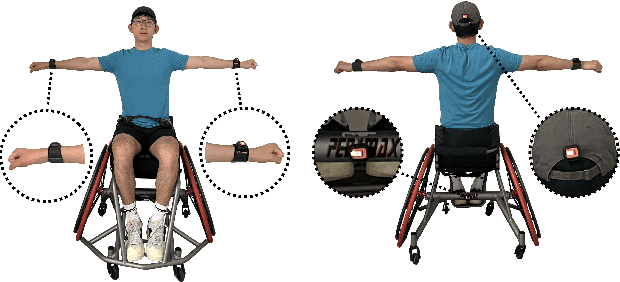
Despite researchers having extensively studied various ways to track body pose on-the-go, most prior work does not take into account wheelchair users, leading to poor tracking performance. Wheelchair users could greatly benefit from this pose information to prevent injuries, monitor their health, identify environmental accessibility barriers, and interact with gaming and VR experiences. In this work, we present WheelPoser, a real-time pose estimation system specifically designed for wheelchair users. Our system uses only four strategically placed IMUs on the user's body and wheelchair, making it far more practical than prior systems using cameras and dense IMU arrays. WheelPoser is able to track a wheelchair user's pose with a mean joint angle error of 14.30 degrees and a mean joint position error of 6.74 cm, more than three times better than similar systems using sparse IMUs. To train our system, we collect a novel WheelPoser-IMU dataset, consisting of 167 minutes of paired IMU sensor and motion capture data of people in wheelchairs, including wheelchair-specific motions such as propulsion and pressure relief. Finally, we explore the potential application space enabled by our system and discuss future opportunities. Open-source code, models, and dataset can be found here: https://github.com/axle-lab/WheelPoser.