 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Energy-Efficient Edge Coprocessor for Neural Rendering with Explicit Data Reuse Strategies
Oct 09, 2025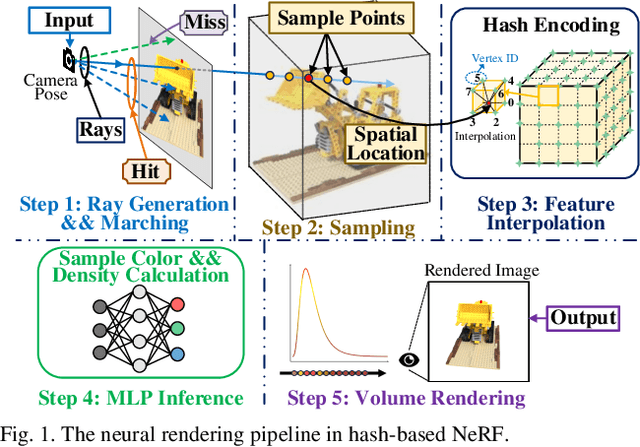
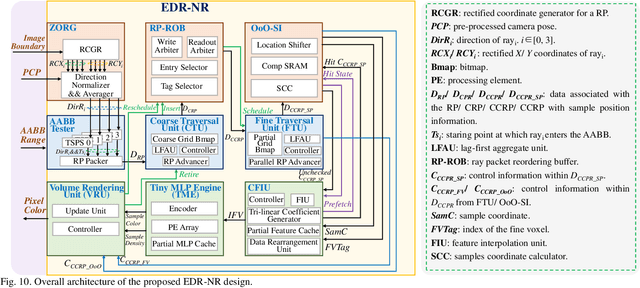
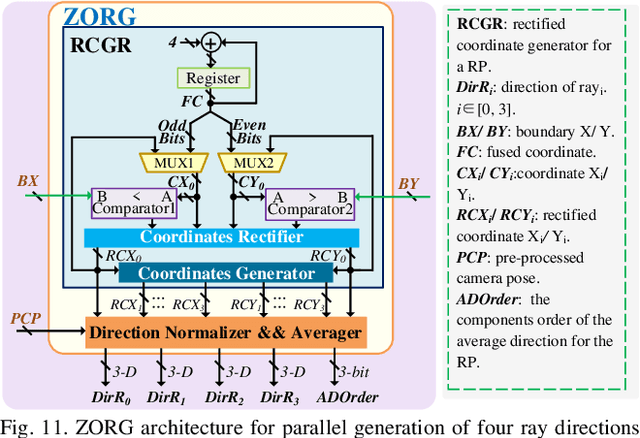
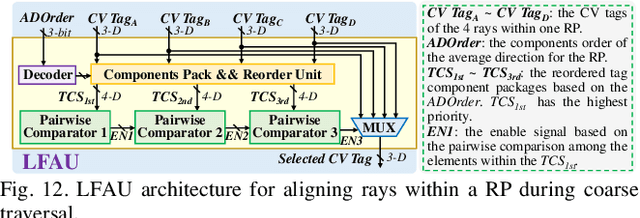
Neural radiance fields (NeRF) have transformed 3D reconstruction and rendering, facilitating photorealistic image synthesis from sparse viewpoints. This work introduces an explicit data reuse neural rendering (EDR-NR) architecture, which reduces frequent external memory accesses (EMAs) and cache misses by exploiting the spatial locality from three phases, including rays, ray packets (RPs), and samples. The EDR-NR architecture features a four-stage scheduler that clusters rays on the basis of Z-order, prioritize lagging rays when ray divergence happens, reorders RPs based on spatial proximity, and issues samples out-of-orderly (OoO) according to the availability of on-chip feature data. In addition, a four-tier hierarchical RP marching (HRM) technique is integrated with an axis-aligned bounding box (AABB) to facilitate spatial skipping (SS), reducing redundant computations and improving throughput. Moreover, a balanced allocation strategy for feature storage is proposed to mitigate SRAM bank conflicts. Fabricated using a 40 nm process with a die area of 10.5 mmX, the EDR-NR chip demonstrates a 2.41X enhancement in normalized energy efficiency, a 1.21X improvement in normalized area efficiency, a 1.20X increase in normalized throughput, and a 53.42% reduction in on-chip SRAM consumption compared to state-of-the-art accelerators.
ACSC: Automatic Calibration for Non-repetitive Scanning Solid-State LiDAR and Camera Systems
Nov 17, 2020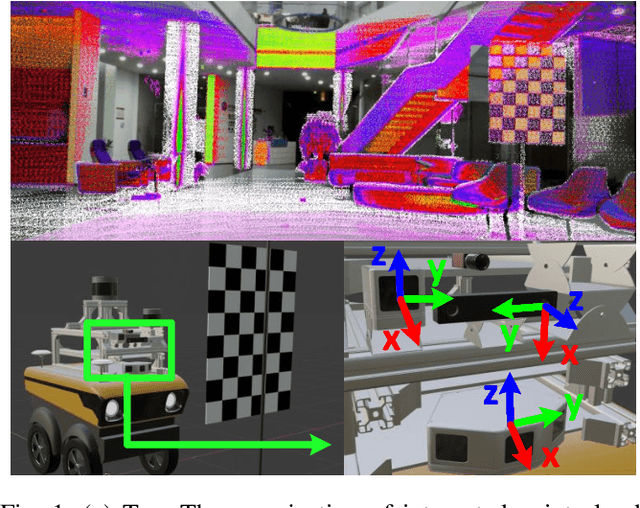
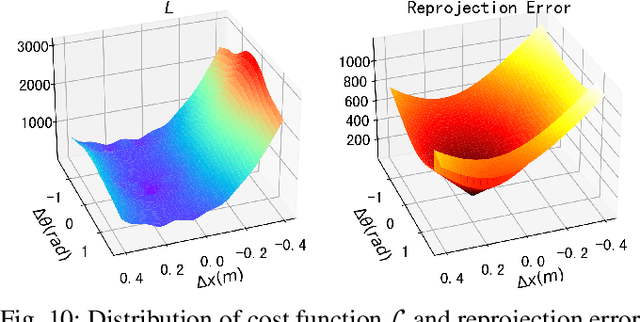
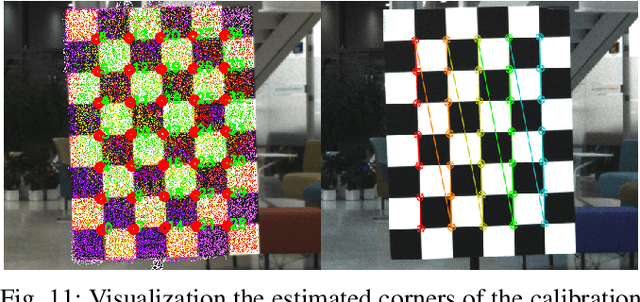
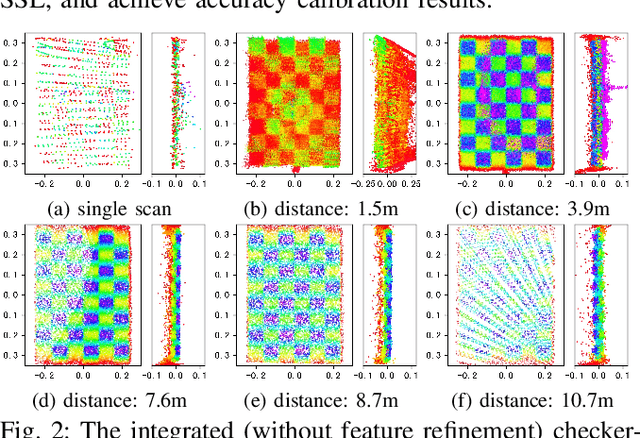
Recently, the rapid development of Solid-State LiDAR (SSL) enables low-cost and efficient obtainment of 3D point clouds from the environment, which has inspired a large quantity of studies and applications. However, the non-uniformity of its scanning pattern, and the inconsistency of the ranging error distribution bring challenges to its calibration task. In this paper, we proposed a fully automatic calibration method for the non-repetitive scanning SSL and camera systems. First, a temporal-spatial-based geometric feature refinement method is presented, to extract effective features from SSL point clouds; then, the 3D corners of the calibration target (a printed checkerboard) are estimated with the reflectance distribution of points. Based on the above, a target-based extrinsic calibration method is finally proposed. We evaluate the proposed method on different types of LiDAR and camera sensor combinations in real conditions, and achieve accuracy and robustness calibration results. The code is available at https://github.com/HViktorTsoi/ACSC.git .