 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation & Recognition under Perspective of Random-Fuzzy Dual Interpretation of Unknown Quantity: with Demonstration of IMM Filter
Nov 02, 2021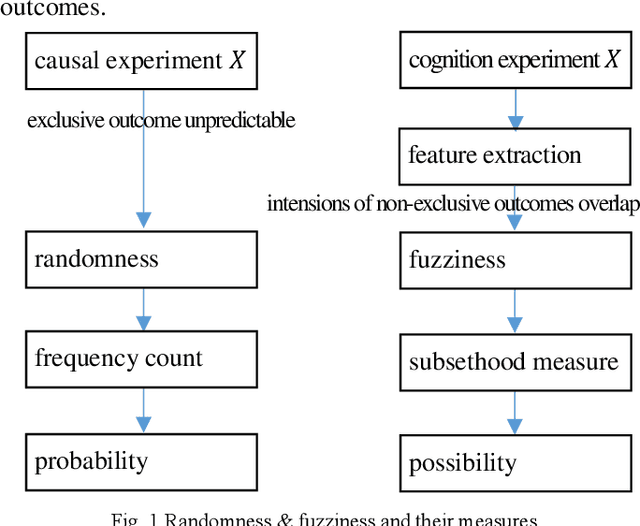
This paper is to consider the problems of estimation and recognition from the perspective of sigma-max inference (probability-possibility inference), with a focus on discovering whether some of the unknown quantities involved could be more faithfully modeled as fuzzy uncertainty. Two related key issues are addressed: 1) the random-fuzzy dual interpretation of unknown quantity being estimated; 2) the principle of selecting sigma-max operator for practical problems, such as estimation and recognition. Our perspective, conceived from definitions of randomness and fuzziness, is that continuous unknown quantity involved in estimation with inaccurate prior should be more appropriately modeled as randomness and handled by sigma inference; whereas discrete unknown quantity involved in recognition with insufficient (and inaccurate) prior could be better modeled as fuzziness and handled by max inference. The philosophy was demonstrated by an updated version of the well-known interacting multiple model (IMM) filter, for which the jump Markovian System is reformulated as a hybrid uncertainty system, with continuous state evolution modeled as usual as model-conditioned stochastic system and discrete mode transitions modeled as fuzzy system by a possibility (instead of probability) transition matrix, and hypotheses mixing is conducted by using the operation of "max" instead of "sigma". For our example of maneuvering target tracking using simulated data from both a short-range fire control radar and a long-range surveillance radar, the updated IMM filter shows significant improvement over the classic IMM filter, due to its peculiarity of hard decision of system model and a faster response to the transition of discrete mode.