 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint Context: An Effective Shape Descriptor for RST-invariant Trajectory Recognition
Jan 22, 2015
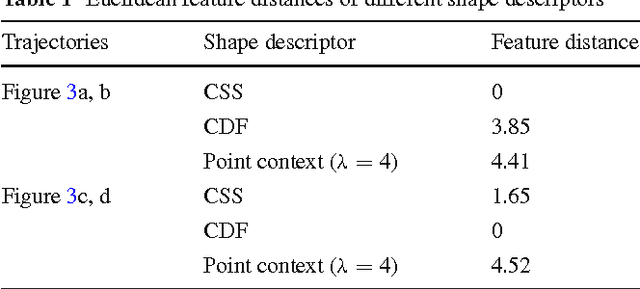
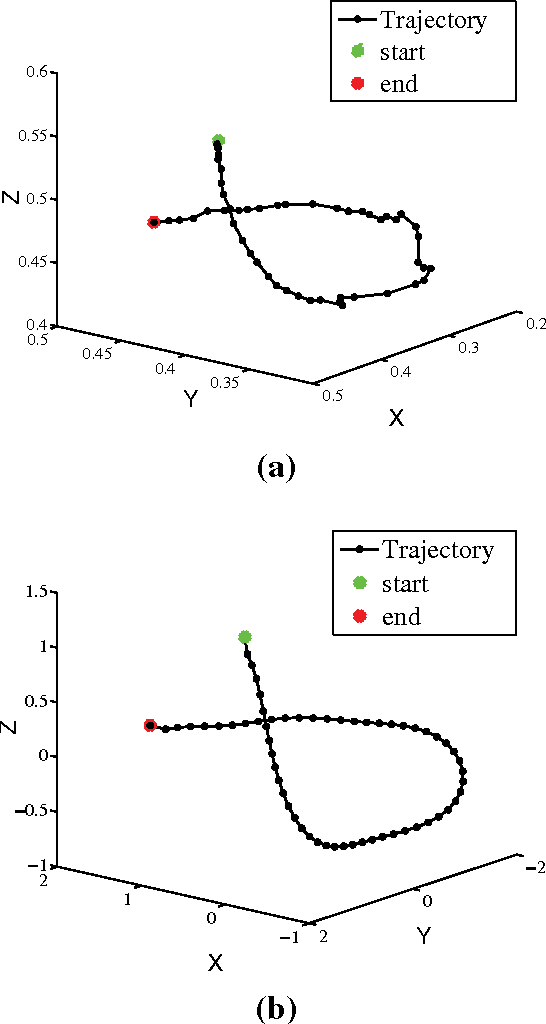
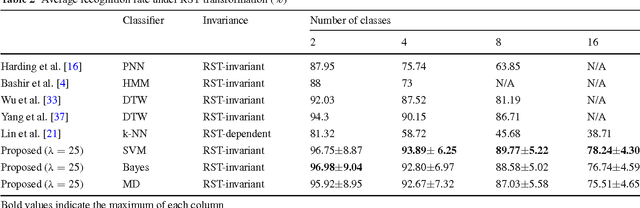
Motion trajectory recognition is important for characterizing the moving property of an object. The speed and accuracy of trajectory recognition rely on a compact and discriminative feature representation, and the situations of varying rotation, scaling and translation has to be specially considered. In this paper we propose a novel feature extraction method for trajectories. Firstly a trajectory is represented by a proposed point context, which is a rotation-scale-translation (RST) invariant shape descriptor with a flexible tradeoff between computational complexity and discrimination, yet we prove that it is a complete shape descriptor. Secondly, the shape context is nonlinearly mapped to a subspace by kernel nonparametric discriminant analysis (KNDA) to get a compact feature representation, and thus a trajectory is projected to a single point in a low-dimensional feature space. Experimental results show that, the proposed trajectory feature shows encouraging improvement than state-of-art methods.
* 11 pages, 10 figures