 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVALERIAN: Invariant Feature Learning for IMU Sensor-based Human Activity Recognition in the Wild
Mar 03, 2023Deep neural network models for IMU sensor-based human activity recognition (HAR) that are trained from controlled, well-curated datasets suffer from poor generalizability in practical deployments. However, data collected from naturalistic settings often contains significant label noise. In this work, we examine two in-the-wild HAR datasets and DivideMix, a state-of-the-art learning with noise labels (LNL) method to understand the extent and impacts of noisy labels in training data. Our empirical analysis reveals that the substantial domain gaps among diverse subjects cause LNL methods to violate a key underlying assumption, namely, neural networks tend to fit simpler (and thus clean) data in early training epochs. Motivated by the insights, we design VALERIAN, an invariant feature learning method for in-the-wild wearable sensor-based HAR. By training a multi-task model with separate task-specific layers for each subject, VALERIAN allows noisy labels to be dealt with individually while benefiting from shared feature representation across subjects. We evaluated VALERIAN on four datasets, two collected in a controlled environment and two in the wild.
CROMOSim: A Deep Learning-based Cross-modality Inertial Measurement Simulator
Feb 21, 2022
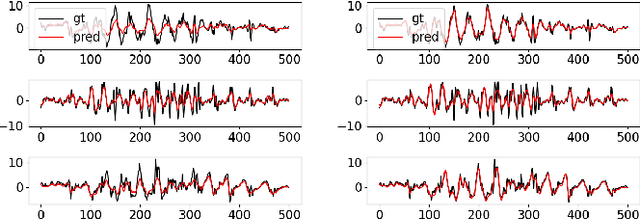
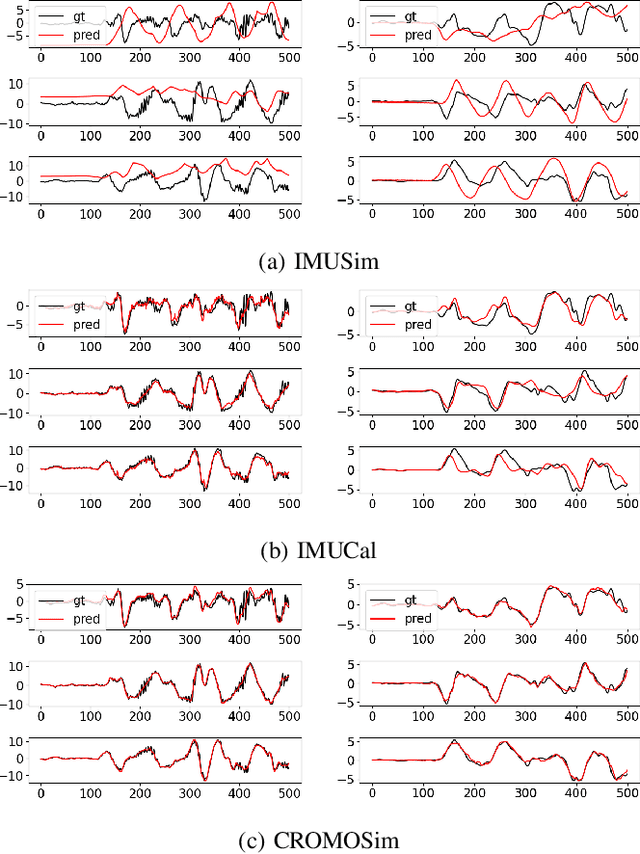
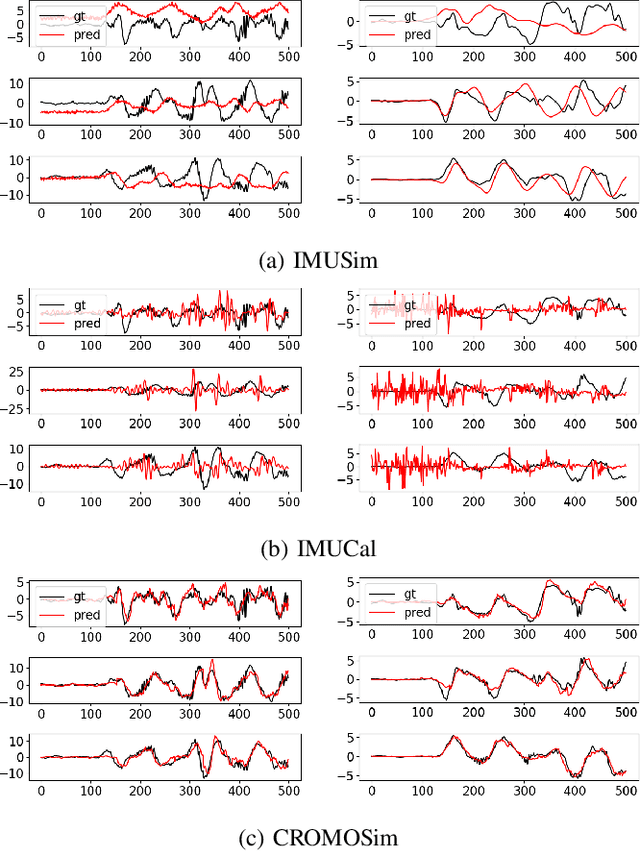
With the prevalence of wearable devices, inertial measurement unit (IMU) data has been utilized in monitoring and assessment of human mobility such as human activity recognition (HAR). Training deep neural network (DNN) models for these tasks require a large amount of labeled data, which are hard to acquire in uncontrolled environments. To mitigate the data scarcity problem, we design CROMOSim, a cross-modality sensor simulator that simulates high fidelity virtual IMU sensor data from motion capture systems or monocular RGB cameras. It utilizes a skinned multi-person linear model (SMPL) for 3D body pose and shape representations, to enable simulation from arbitrary on-body positions. A DNN model is trained to learn the functional mapping from imperfect trajectory estimations in a 3D SMPL body tri-mesh due to measurement noise, calibration errors, occlusion and other modeling artifacts, to IMU data. We evaluate the fidelity of CROMOSim simulated data and its utility in data augmentation on various HAR datasets. Extensive experiment results show that the proposed model achieves a 6.7% improvement over baseline methods in a HAR task.
Invariant Feature Learning for Sensor-based Human Activity Recognition
Dec 14, 2020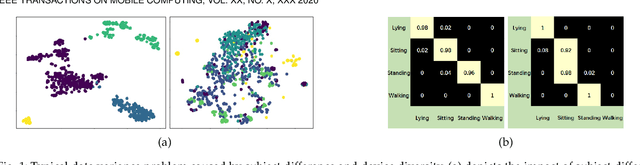

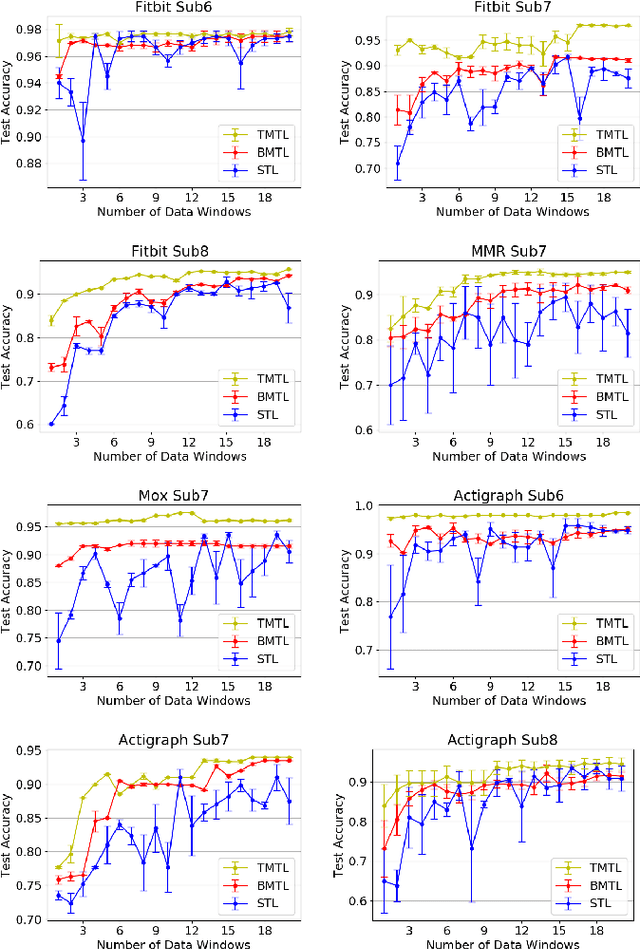
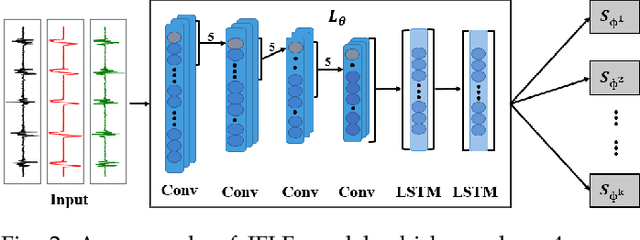
Wearable sensor-based human activity recognition (HAR) has been a research focus in the field of ubiquitous and mobile computing for years. In recent years, many deep models have been applied to HAR problems. However, deep learning methods typically require a large amount of data for models to generalize well. Significant variances caused by different participants or diverse sensor devices limit the direct application of a pre-trained model to a subject or device that has not been seen before. To address these problems, we present an invariant feature learning framework (IFLF) that extracts common information shared across subjects and devices. IFLF incorporates two learning paradigms: 1) meta-learning to capture robust features across seen domains and adapt to an unseen one with similarity-based data selection; 2) multi-task learning to deal with data shortage and enhance overall performance via knowledge sharing among different subjects. Experiments demonstrated that IFLF is effective in handling both subject and device diversion across popular open datasets and an in-house dataset. It outperforms a baseline model of up to 40% in test accuracy.