 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning-Based Battery Conditioning Hierarchical V2G Coordination for Multi-Stakeholder Benefits
Aug 01, 2023


With the growing prevalence of electric vehicles (EVs) and advancements in EV electronics, vehicle-to-grid (V2G) techniques and large-scale scheduling strategies have emerged to promote renewable energy utilization and power grid stability. This study proposes a multi-stakeholder hierarchical V2G coordination based on deep reinforcement learning (DRL) and the Proof of Stake algorithm. Furthermore, the multi-stakeholders include the power grid, EV aggregators (EVAs), and users, and the proposed strategy can achieve multi-stakeholder benefits. On the grid side, load fluctuations and renewable energy consumption are considered, while on the EVA side, energy constraints and charging costs are considered. The three critical battery conditioning parameters of battery SOX are considered on the user side, including state of charge, state of power, and state of health. Compared with four typical baselines, the multi-stakeholder hierarchical coordination strategy can enhance renewable energy consumption, mitigate load fluctuations, meet the energy demands of EVA, and reduce charging costs and battery degradation under realistic operating conditions.
Collective Large-scale Wind Farm Multivariate Power Output Control Based on Hierarchical Communication Multi-Agent Proximal Policy Optimization
May 17, 2023Wind power is becoming an increasingly important source of renewable energy worldwide. However, wind farm power control faces significant challenges due to the high system complexity inherent in these farms. A novel communication-based multi-agent deep reinforcement learning large-scale wind farm multivariate control is proposed to handle this challenge and maximize power output. A wind farm multivariate power model is proposed to study the influence of wind turbines (WTs) wake on power. The multivariate model includes axial induction factor, yaw angle, and tilt angle controllable variables. The hierarchical communication multi-agent proximal policy optimization (HCMAPPO) algorithm is proposed to coordinate the multivariate large-scale wind farm continuous controls. The large-scale wind farm is divided into multiple wind turbine aggregators (WTAs), and neighboring WTAs can exchange information through hierarchical communication to maximize the wind farm power output. Simulation results demonstrate that the proposed multivariate HCMAPPO can significantly increase wind farm power output compared to the traditional PID control, coordinated model-based predictive control, and multi-agent deep deterministic policy gradient algorithm. Particularly, the HCMAPPO algorithm can be trained with the environment based on the thirteen-turbine wind farm and effectively applied to larger wind farms. At the same time, there is no significant increase in the fatigue damage of the wind turbine blade from the wake control as the wind farm scale increases. The multivariate HCMAPPO control can realize the collective large-scale wind farm maximum power output.
Transfer Deep Reinforcement Learning-based Large-scale V2G Continuous Charging Coordination with Renewable Energy Sources
Oct 13, 2022

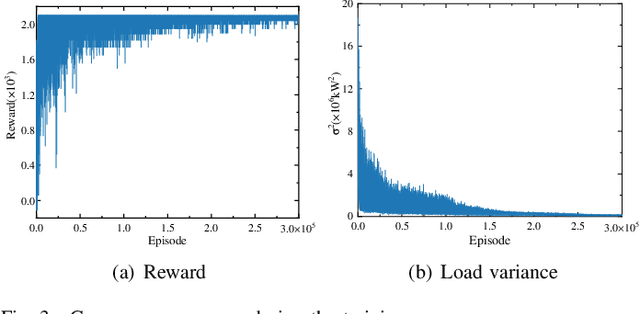
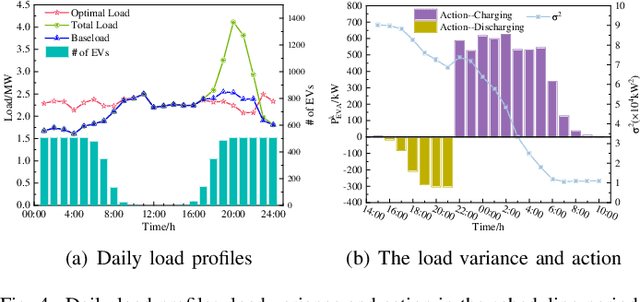
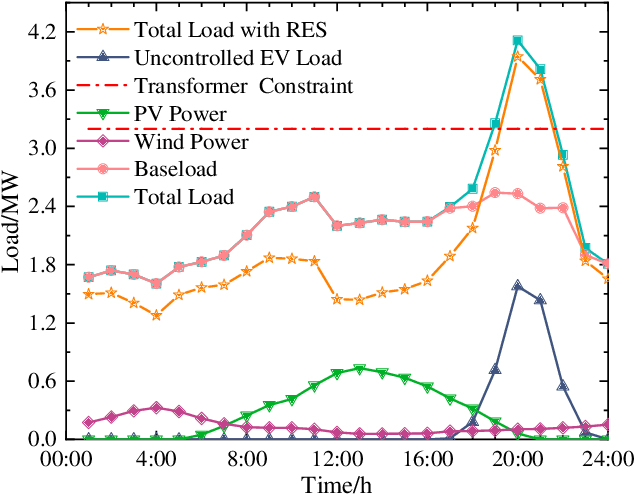
Due to the increasing popularity of electric vehicles (EVs) and the technological advancement of EV electronics, the vehicle-to-grid (V2G) technique and large-scale scheduling algorithms have been developed to achieve a high level of renewable energy and power grid stability. This paper proposes a deep reinforcement learning (DRL) method for the continuous charging/discharging coordination strategy in aggregating large-scale EVs in V2G mode with renewable energy sources (RES). The DRL coordination strategy can efficiently optimize the electric vehicle aggregator's (EVA's) real-time charging/discharging power with the state of charge (SOC) constraints of the EVA and the individual EV. Compared with uncontrolled charging, the load variance is reduced by 97.37$\%$ and the charging cost by 76.56$\%$. The DRL coordination strategy further demonstrates outstanding transfer learning ability to microgrids with RES and large-scale EVA, as well as the complicated weekly scheduling. The DRL coordination strategy demonstrates flexible, adaptable, and scalable performance for the large-scale V2G under realistic operating conditions.