 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Correlation Network: End-to-End Joint Multi-Object Detection and Tracking
Apr 10, 2021

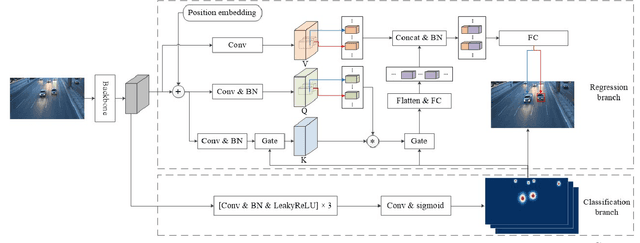

Multi-object tracking (MOT) has made great progress in recent years, but there are still some problems. Most MOT algorithms follow tracking-by-detection framework, which separates detection and tracking into two independent parts. Early tracking-by-detection algorithms need to do two feature extractions for detection and tracking. Recently, some algorithms make the feature extraction into one network, but the tracking part still relies on data association and needs complex post-processing for life cycle management. Those methods do not combine detection and tracking well. In this paper, we present a novel network to realize joint multi-object detection and tracking in an end-to-end way, called Global Correlation Network (GCNet). Different from most object detection methods, GCNet introduces the global correlation layer for regression of absolute size and coordinates of bounding boxes instead of offsets prediction. The pipeline of detection and tracking by GCNet is conceptually simple, which does not need non-maximum suppression, data association, and other complicated tracking strategies. GCNet was evaluated on a multi-vehicle tracking dataset, UA-DETRAC, and demonstrates promising performance compared to the state-of-the-art detectors and trackers.