 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Control for Marine Vessels Against Harsh Environmental Variation
Sep 29, 2019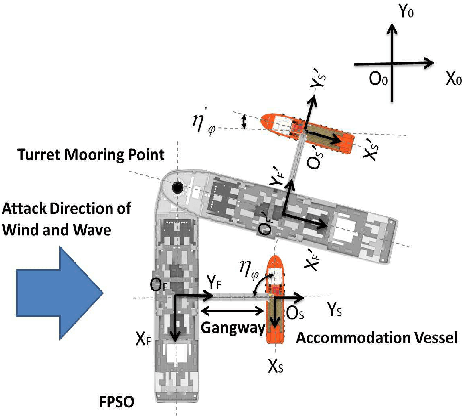
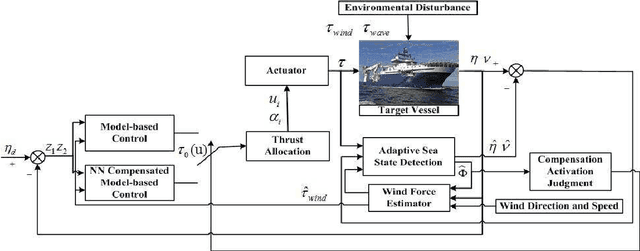
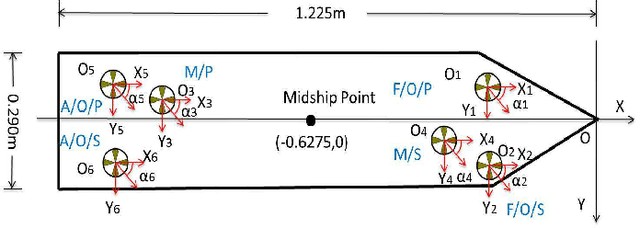

In this paper, robust control with sea state observer and dynamic thrust allocation is proposed for the Dynamic Positioning (DP) of an accommodation vessel in the presence of unknown hydrodynamic force variation and the input time delay. In order to overcome the huge force variation due to the adjoining Floating Production Storage and Offloading (FPSO) and accommodation vessel, a novel sea state observer is designed. The sea observer can effectively monitor the variation of the drift wave-induced force on the vessel and activate Neural Network (NN) compensator in the controller when large wave force is identified. Moreover, the wind drag coefficients can be adaptively approximated in the sea observer so that a feedforward control can be achieved. Based on this, a robust constrained control is developed to guarantee a safe operation. The time delay inside the control input is also considered. Dynamic thrust allocation module is presented to distribute the generalized control input among azimuth thrusters. Under the proposed sea observer and control, the boundedness of all the closed-loop signals are demonstrated via rigorous Lyapunov analysis. A set of simulation studies are conducted to verify the effectiveness of the proposed control scheme.