 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenCapBench: A Benchmark to Bridge Pose Estimation and Biomechanics
Jun 14, 2024Pose estimation has promised to impact healthcare by enabling more practical methods to quantify nuances of human movement and biomechanics. However, despite the inherent connection between pose estimation and biomechanics, these disciplines have largely remained disparate. For example, most current pose estimation benchmarks use metrics such as Mean Per Joint Position Error, Percentage of Correct Keypoints, or mean Average Precision to assess performance, without quantifying kinematic and physiological correctness - key aspects for biomechanics. To alleviate this challenge, we develop OpenCapBench to offer an easy-to-use unified benchmark to assess common tasks in human pose estimation, evaluated under physiological constraints. OpenCapBench computes consistent kinematic metrics through joints angles provided by an open-source musculoskeletal modeling software (OpenSim). Through OpenCapBench, we demonstrate that current pose estimation models use keypoints that are too sparse for accurate biomechanics analysis. To mitigate this challenge, we introduce SynthPose, a new approach that enables finetuning of pre-trained 2D human pose models to predict an arbitrarily denser set of keypoints for accurate kinematic analysis through the use of synthetic data. Incorporating such finetuning on synthetic data of prior models leads to twofold reduced joint angle errors. Moreover, OpenCapBench allows users to benchmark their own developed models on our clinically relevant cohort. Overall, OpenCapBench bridges the computer vision and biomechanics communities, aiming to drive simultaneous advances in both areas.
A Skeleton-based Approach For Rock Crack Detection Towards A Climbing Robot Application
Sep 10, 2023
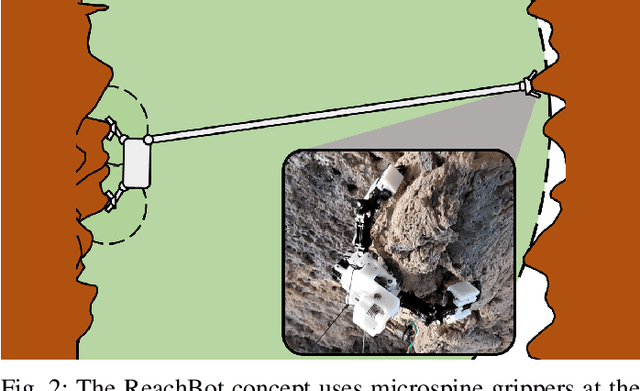
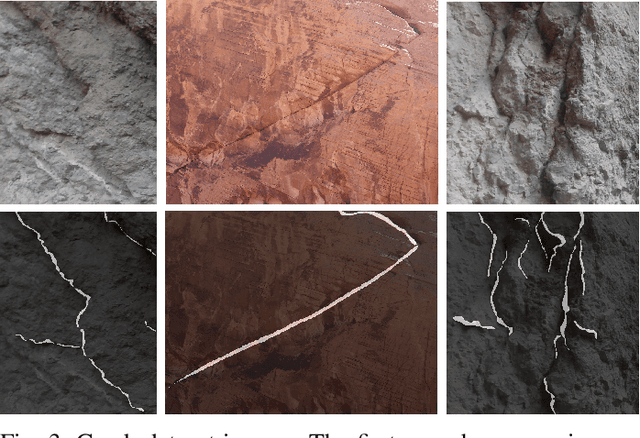
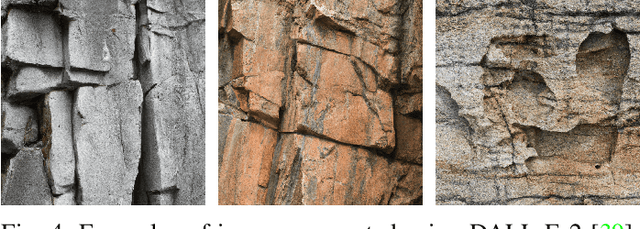
Conventional wheeled robots are unable to traverse scientifically interesting, but dangerous, cave environments. Multi-limbed climbing robot designs, such as ReachBot, are able to grasp irregular surface features and execute climbing motions to overcome obstacles, given suitable grasp locations. To support grasp site identification, we present a method for detecting rock cracks and edges, the SKeleton Intersection Loss (SKIL). SKIL is a loss designed for thin object segmentation that leverages the skeleton of the label. A dataset of rock face images was collected, manually annotated, and augmented with generated data. A new group of metrics, LineAcc, has been proposed for thin object segmentation such that the impact of the object width on the score is minimized. In addition, the metric is less sensitive to translation which can often lead to a score of zero when computing classical metrics such as Dice on thin objects. Our fine-tuned models outperform previous methods on similar thin object segmentation tasks such as blood vessel segmentation and show promise for integration onto a robotic system.