 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Methodologies for Agentic Evaluations Across Domains: Leakage of Sensitive Information, Fraud and Cybersecurity Threats
Jan 22, 2026The rapid rise of autonomous AI systems and advancements in agent capabilities are introducing new risks due to reduced oversight of real-world interactions. Yet agent testing remains nascent and is still a developing science. As AI agents begin to be deployed globally, it is important that they handle different languages and cultures accurately and securely. To address this, participants from The International Network for Advanced AI Measurement, Evaluation and Science, including representatives from Singapore, Japan, Australia, Canada, the European Commission, France, Kenya, South Korea, and the United Kingdom have come together to align approaches to agentic evaluations. This is the third exercise, building on insights from two earlier joint testing exercises conducted by the Network in November 2024 and February 2025. The objective is to further refine best practices for testing advanced AI systems. The exercise was split into two strands: (1) common risks, including leakage of sensitive information and fraud, led by Singapore AISI; and (2) cybersecurity, led by UK AISI. A mix of open and closed-weight models were evaluated against tasks from various public agentic benchmarks. Given the nascency of agentic testing, our primary focus was on understanding methodological issues in conducting such tests, rather than examining test results or model capabilities. This collaboration marks an important step forward as participants work together to advance the science of agentic evaluations.
Improving Methodologies for LLM Evaluations Across Global Languages
Jan 22, 2026As frontier AI models are deployed globally, it is essential that their behaviour remains safe and reliable across diverse linguistic and cultural contexts. To examine how current model safeguards hold up in such settings, participants from the International Network for Advanced AI Measurement, Evaluation and Science, including representatives from Singapore, Japan, Australia, Canada, the EU, France, Kenya, South Korea and the UK conducted a joint multilingual evaluation exercise. Led by Singapore AISI, two open-weight models were tested across ten languages spanning high and low resourced groups: Cantonese English, Farsi, French, Japanese, Korean, Kiswahili, Malay, Mandarin Chinese and Telugu. Over 6,000 newly translated prompts were evaluated across five harm categories (privacy, non-violent crime, violent crime, intellectual property and jailbreak robustness), using both LLM-as-a-judge and human annotation. The exercise shows how safety behaviours can vary across languages. These include differences in safeguard robustness across languages and harm types and variation in evaluator reliability (LLM-as-judge vs. human review). Further, it also generated methodological insights for improving multilingual safety evaluations, such as the need for culturally contextualised translations, stress-tested evaluator prompts and clearer human annotation guidelines. This work represents an initial step toward a shared framework for multilingual safety testing of advanced AI systems and calls for continued collaboration with the wider research community and industry.
Cityscape-Adverse: Benchmarking Robustness of Semantic Segmentation with Realistic Scene Modifications via Diffusion-Based Image Editing
Nov 01, 2024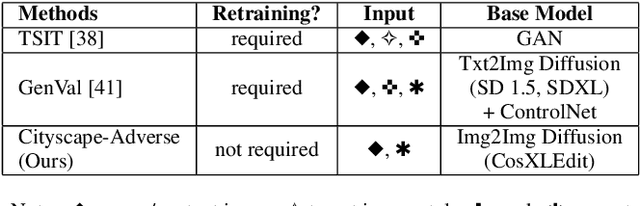

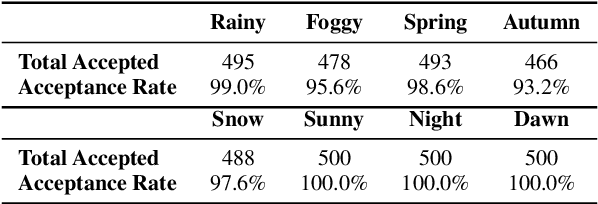

Recent advancements in generative AI, particularly diffusion-based image editing, have enabled the transformation of images into highly realistic scenes using only text instructions. This technology offers significant potential for generating diverse synthetic datasets to evaluate model robustness. In this paper, we introduce Cityscape-Adverse, a benchmark that employs diffusion-based image editing to simulate eight adverse conditions, including variations in weather, lighting, and seasons, while preserving the original semantic labels. We evaluate the reliability of diffusion-based models in generating realistic scene modifications and assess the performance of state-of-the-art CNN and Transformer-based semantic segmentation models under these challenging conditions. Additionally, we analyze which modifications have the greatest impact on model performance and explore how training on synthetic datasets can improve robustness in real-world adverse scenarios. Our results demonstrate that all tested models, particularly CNN-based architectures, experienced significant performance degradation under extreme conditions, while Transformer-based models exhibited greater resilience. We verify that models trained on Cityscape-Adverse show significantly enhanced resilience when applied to unseen domains. Code and datasets will be released at https://github.com/naufalso/cityscape-adverse.
Adversarial Manhole: Challenging Monocular Depth Estimation and Semantic Segmentation Models with Patch Attack
Aug 27, 2024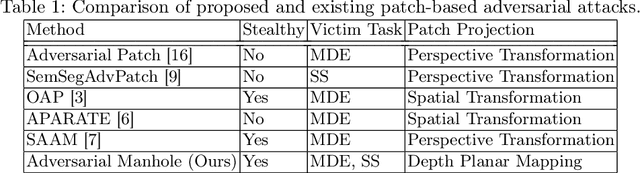
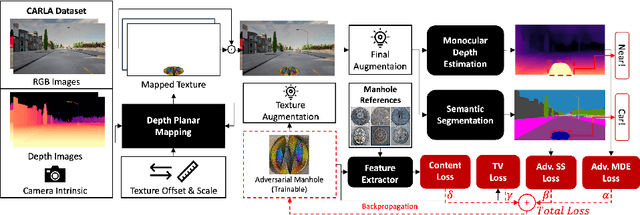
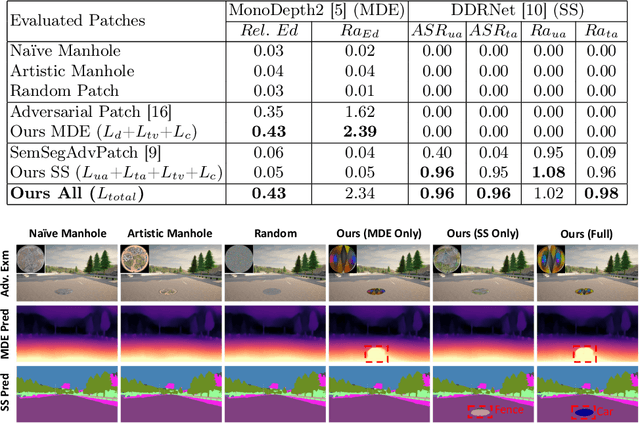
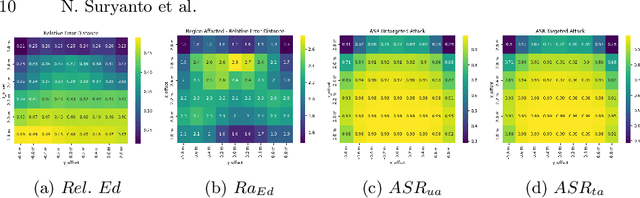
Monocular depth estimation (MDE) and semantic segmentation (SS) are crucial for the navigation and environmental interpretation of many autonomous driving systems. However, their vulnerability to practical adversarial attacks is a significant concern. This paper presents a novel adversarial attack using practical patches that mimic manhole covers to deceive MDE and SS models. The goal is to cause these systems to misinterpret scenes, leading to false detections of near obstacles or non-passable objects. We use Depth Planar Mapping to precisely position these patches on road surfaces, enhancing the attack's effectiveness. Our experiments show that these adversarial patches cause a 43% relative error in MDE and achieve a 96% attack success rate in SS. These patches create affected error regions over twice their size in MDE and approximately equal to their size in SS. Our studies also confirm the patch's effectiveness in physical simulations, the adaptability of the patches across different target models, and the effectiveness of our proposed modules, highlighting their practical implications.
ACTIVE: Towards Highly Transferable 3D Physical Camouflage for Universal and Robust Vehicle Evasion
Aug 16, 2023



Adversarial camouflage has garnered attention for its ability to attack object detectors from any viewpoint by covering the entire object's surface. However, universality and robustness in existing methods often fall short as the transferability aspect is often overlooked, thus restricting their application only to a specific target with limited performance. To address these challenges, we present Adversarial Camouflage for Transferable and Intensive Vehicle Evasion (ACTIVE), a state-of-the-art physical camouflage attack framework designed to generate universal and robust adversarial camouflage capable of concealing any 3D vehicle from detectors. Our framework incorporates innovative techniques to enhance universality and robustness, including a refined texture rendering that enables common texture application to different vehicles without being constrained to a specific texture map, a novel stealth loss that renders the vehicle undetectable, and a smooth and camouflage loss to enhance the naturalness of the adversarial camouflage. Our extensive experiments on 15 different models show that ACTIVE consistently outperforms existing works on various public detectors, including the latest YOLOv7. Notably, our universality evaluations reveal promising transferability to other vehicle classes, tasks (segmentation models), and the real world, not just other vehicles.
DTA: Physical Camouflage Attacks using Differentiable Transformation Network
Mar 18, 2022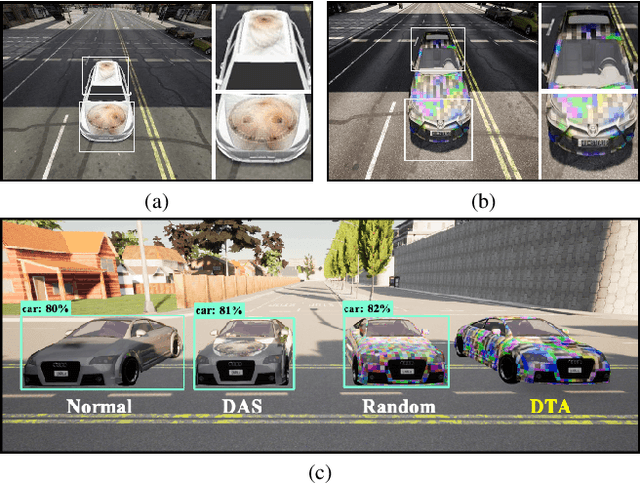
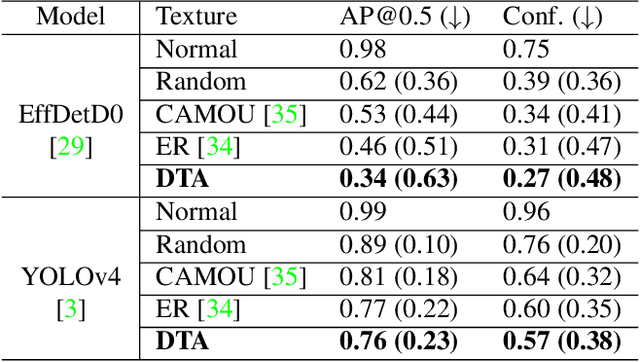
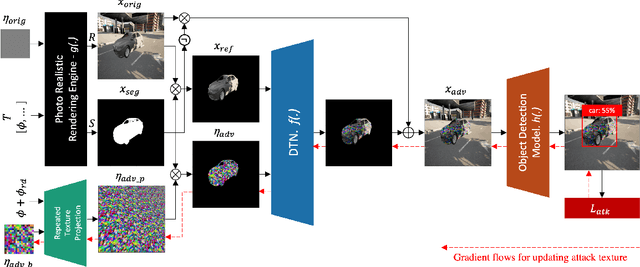
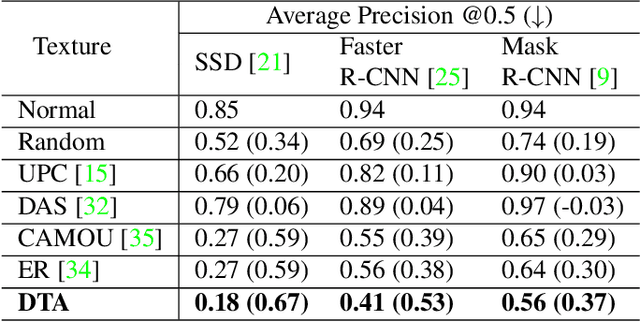
To perform adversarial attacks in the physical world, many studies have proposed adversarial camouflage, a method to hide a target object by applying camouflage patterns on 3D object surfaces. For obtaining optimal physical adversarial camouflage, previous studies have utilized the so-called neural renderer, as it supports differentiability. However, existing neural renderers cannot fully represent various real-world transformations due to a lack of control of scene parameters compared to the legacy photo-realistic renderers. In this paper, we propose the Differentiable Transformation Attack (DTA), a framework for generating a robust physical adversarial pattern on a target object to camouflage it against object detection models with a wide range of transformations. It utilizes our novel Differentiable Transformation Network (DTN), which learns the expected transformation of a rendered object when the texture is changed while preserving the original properties of the target object. Using our attack framework, an adversary can gain both the advantages of the legacy photo-realistic renderers including various physical-world transformations and the benefit of white-box access by offering differentiability. Our experiments show that our camouflaged 3D vehicles can successfully evade state-of-the-art object detection models in the photo-realistic environment (i.e., CARLA on Unreal Engine). Furthermore, our demonstration on a scaled Tesla Model 3 proves the applicability and transferability of our method to the real world.