 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerrain Point Cloud Inpainting via Signal Decomposition
Apr 04, 2024



The rapid development of 3D acquisition technology has made it possible to obtain point clouds of real-world terrains. However, due to limitations in sensor acquisition technology or specific requirements, point clouds often contain defects such as holes with missing data. Inpainting algorithms are widely used to patch these holes. However, existing traditional inpainting algorithms rely on precise hole boundaries, which limits their ability to handle cases where the boundaries are not well-defined. On the other hand, learning-based completion methods often prioritize reconstructing the entire point cloud instead of solely focusing on hole filling. Based on the fact that real-world terrain exhibits both global smoothness and rich local detail, we propose a novel representation for terrain point clouds. This representation can help to repair the holes without clear boundaries. Specifically, it decomposes terrains into low-frequency and high-frequency components, which are represented by B-spline surfaces and relative height maps respectively. In this way, the terrain point cloud inpainting problem is transformed into a B-spline surface fitting and 2D image inpainting problem. By solving the two problems, the highly complex and irregular holes on the terrain point clouds can be well-filled, which not only satisfies the global terrain undulation but also exhibits rich geometric details. The experimental results also demonstrate the effectiveness of our method.
A Real-time Critical-scenario-generation Framework for Testing Autonomous Driving System
Jun 02, 2022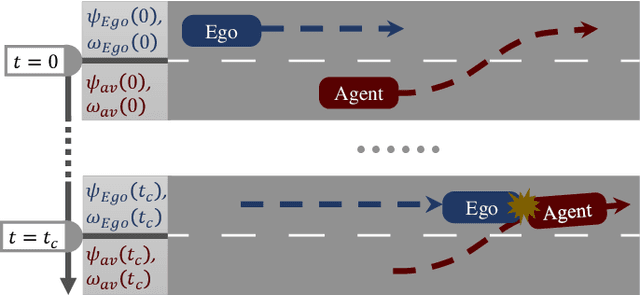
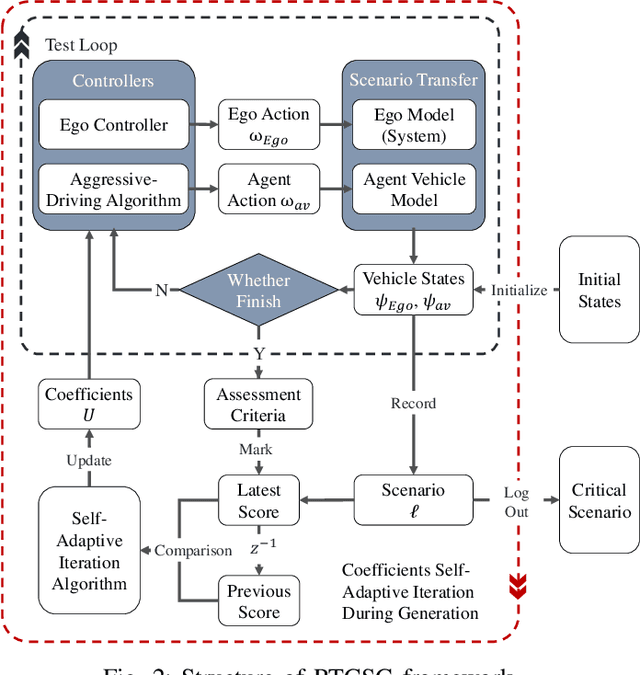
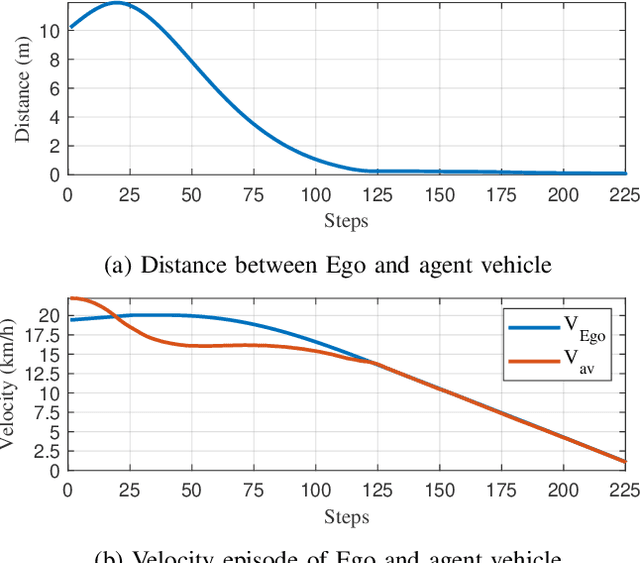
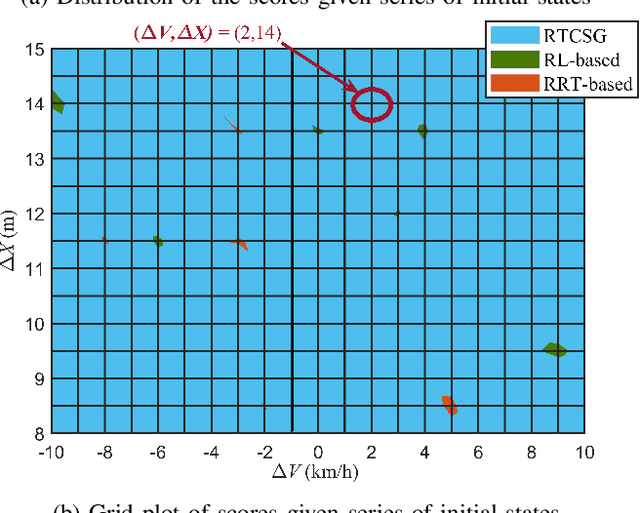
In order to find the most likely failure scenarios which may occur under certain given operation domain, critical-scenario-based test is supposed as an effective and widely used method, which gives suggestions for designers to improve the developing algorithm. However, for the state of art, critical-scenario generation approaches commonly utilize random-search or reinforcement learning methods to generate series of scenarios for a specific algorithm, which takes amounts of computing resource for testing a developing target that is always changing, and inapplicable for testing a real-time system. In this paper, we proposed a real-time critical-scenario-generation (RTCSG) framework to address the above challenges. In our framework, an aggressive-driving algorithm is proposed in controlling the virtual agent vehicles, a specially designed cost function is presented to guide scenarios to evolve towards critical conditions, and a self-adaptive coefficient iteration is designed that enable the approach to operate successfully in different conditions. With our proposed method, the critical-scenarios can be directly generated for the target under test which is a black-box system, and the real-time critical-scenario test can be brought into reality. The simulation results show that our approach is able to obtain more critical scenarios in most conditions than current methods, with a higher stability of success. For a real-time testing, our approach improves the efficiency around 16 times.