 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-Complexity RSS-based Underwater Localization with Unknown Transmit Power
Jan 18, 2026Underwater wireless sensor networks (UWSNs) have received significant attention due to their various applications, with underwater target localization playing a vital role in enhancing network performance. Given the challenges and high costs associated with UWSN deployments, Received Signal Strength (RSS)-based localization offers a viable solution due to its minimal hardware requirements and cost-effectiveness. In this paper, we assign distance-based weights to RSS measurements, providing higher reliability to closer anchor nodes. Using the weighted RSS measurements and generalized trust region subproblem (GTRS), we propose the GTRS-based localization technique with Unknown Transmit Power (GUTP), which can be solved by a simple bisection method. Unlike conventional localization methods that require prior knowledge of the target node's transmit power, GUTP jointly estimates both the location and transmit power of the target node, broadening its practical use. Additionally, we derive the Cramer-Rao lower bounds (CRLBs) for RSS-based underwater localization with known and unknown transmit power, respectively. Extensive simulations demonstrate that GUTP achieves enhanced accuracy and significantly lower computational complexity in estimating the target node's location and transmit power compared to existing semidefinite programming (SDP)-based techniques.
GPS-Independent Localization Techniques for Disaster Rescue
Apr 14, 2025
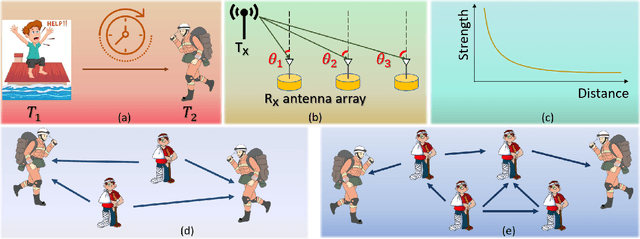
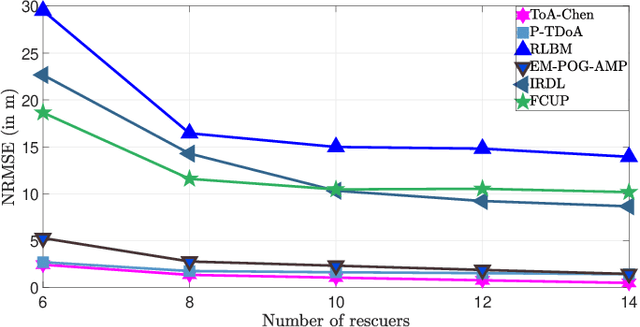
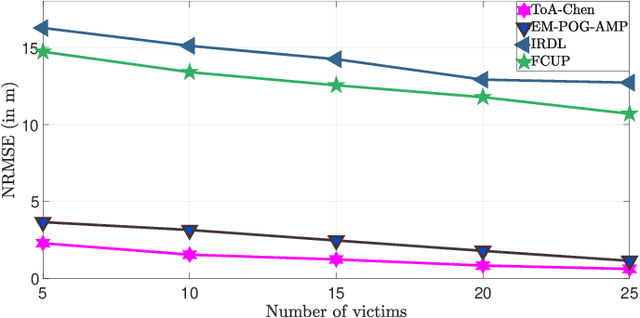
In this article, we present the limitations of traditional localization techniques, such as those using Global Positioning Systems (GPS) and life detectors, in localizing victims during disaster rescue efforts. These techniques usually fall short in accuracy, coverage, and robustness to environmental interference. We then discuss the necessary requirements for developing GPS-independent localization techniques in disaster scenarios. Practical techniques should be passive, with straightforward hardware, low computational demands, low power, and high accuracy, while incorporating unknown environmental information. We review various implementation strategies for these techniques, categorized by measurements (time, angle, and signal strength) and operation manners (non-cooperative and cooperative). Case studies demonstrate trade-offs between localization accuracy and complexity, emphasizing the importance of choosing appropriate localization techniques based on resources and rescue needs for efficient disaster response.
Experimental Validation of Cooperative RSS-based Localization with Unknown Transmit Power, Path Loss Exponent, and Precise Anchor Location
Jun 20, 2024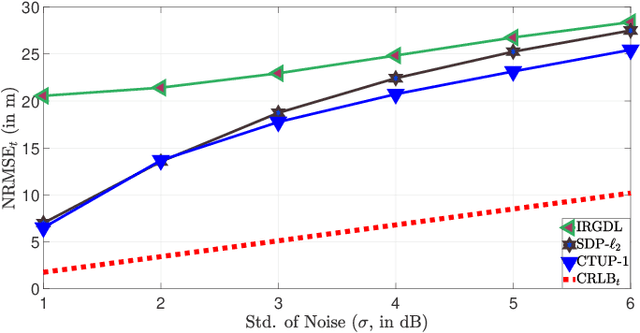
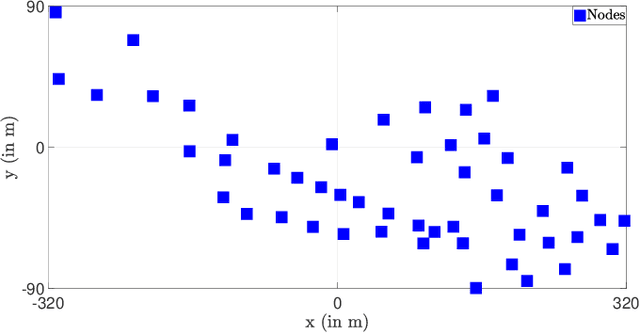
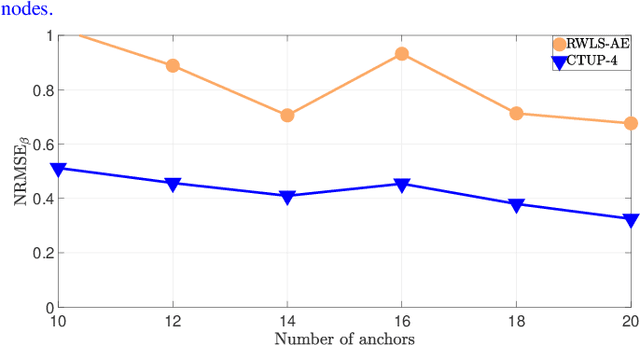
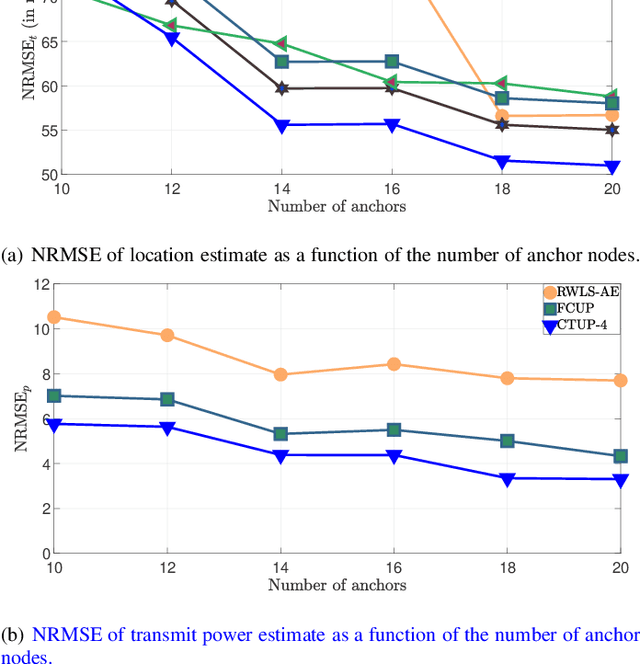
Received signal strength (RSS)--based cooperative localization has gained significant attention due to its straightforward system architectures and cost-effectiveness. In this paper, we propose Cooperative Localization Techniques (with Unknown Parameters), referred to as CTUP(s), which consider uncertainty in anchor nodes' locations and assume the transmit power and \textcolor{blue}{path loss exponent (PLE)} to be unknown. Unlike prior studies, CTUP(s) address unknowns by estimating these parameters, along with the location of target nodes. The non-convex and non-linear nature of the maximum likelihood (ML) estimator of the problem is addressed through relaxation techniques, employing Taylor series expansion, semidefinite relaxation (SDR), and the epigraph method. The resulting problem is solved using semidefinite second-order cone programming (SDP-SOCP), leveraging the precision of SDP and the simplicity of SOCP. We deployed an extensive network comprising 50 BLE nodes covering an area of 640~m $\times$ 180~m to gather RSS data. The precise location of the nodes is obtained using real-time kinematics global positioning system (RTK-GPS), which is treated as the ground truth. Furthermore, to replicate real-world scenarios, we recorded the positions of the anchor nodes using a standard GPS, thereby introducing uncertainty into the anchor node locations. Extensive simulation and hardware experimentation demonstrate the superior performance of CTUP compared to existing techniques.