 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Validation of Cooperative RSS-based Localization with Unknown Transmit Power, Path Loss Exponent, and Precise Anchor Location
Paper and Code
Jun 20, 2024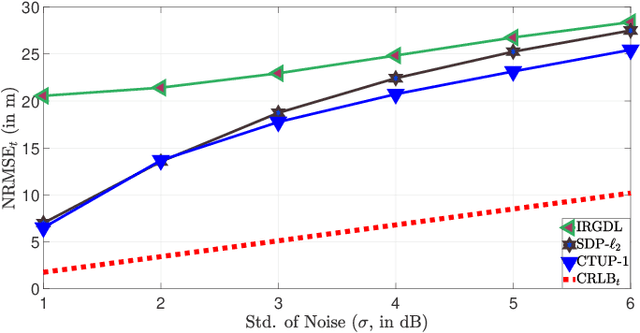
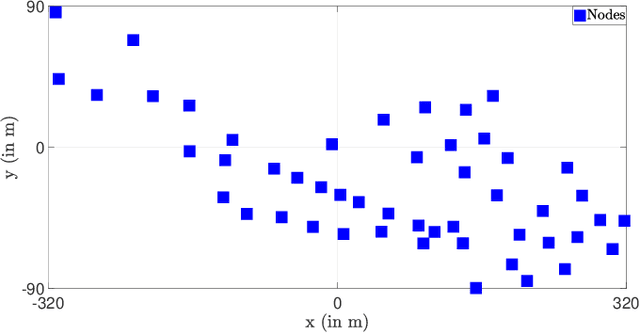
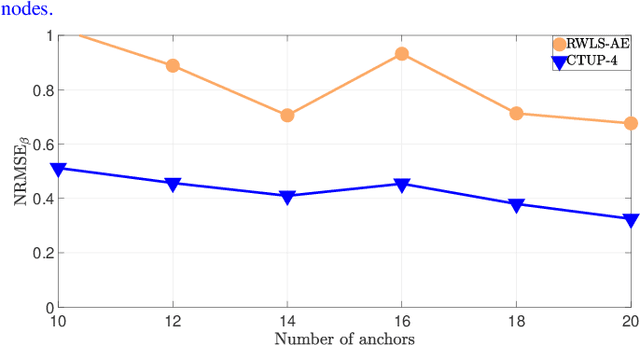
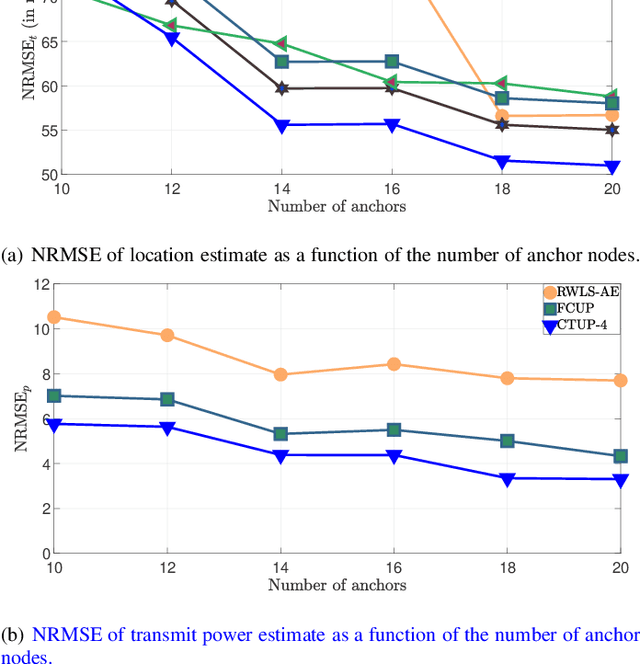
Received signal strength (RSS)--based cooperative localization has gained significant attention due to its straightforward system architectures and cost-effectiveness. In this paper, we propose Cooperative Localization Techniques (with Unknown Parameters), referred to as CTUP(s), which consider uncertainty in anchor nodes' locations and assume the transmit power and \textcolor{blue}{path loss exponent (PLE)} to be unknown. Unlike prior studies, CTUP(s) address unknowns by estimating these parameters, along with the location of target nodes. The non-convex and non-linear nature of the maximum likelihood (ML) estimator of the problem is addressed through relaxation techniques, employing Taylor series expansion, semidefinite relaxation (SDR), and the epigraph method. The resulting problem is solved using semidefinite second-order cone programming (SDP-SOCP), leveraging the precision of SDP and the simplicity of SOCP. We deployed an extensive network comprising 50 BLE nodes covering an area of 640~m $\times$ 180~m to gather RSS data. The precise location of the nodes is obtained using real-time kinematics global positioning system (RTK-GPS), which is treated as the ground truth. Furthermore, to replicate real-world scenarios, we recorded the positions of the anchor nodes using a standard GPS, thereby introducing uncertainty into the anchor node locations. Extensive simulation and hardware experimentation demonstrate the superior performance of CTUP compared to existing techniques.