 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-Critical Tasks Implementation in MEC based Multi-Robot Cooperation Systems
Nov 22, 2021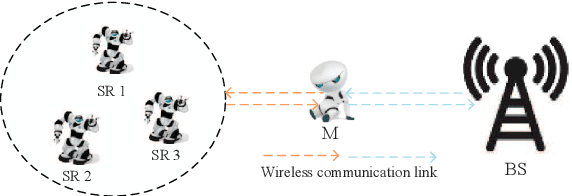
Mobile edge computing (MEC) deployment in a multi-robot cooperation (MRC) system is an effective way to accomplish the tasks in terms of energy consumption and implementation latency. However, the computation and communication resources need to be considered jointly to fully exploit the advantages brought by the MEC technology. In this paper, the scenario where multi robots cooperate to accomplish the time-critical tasks is studied, where an intelligent master robot (MR) acts as an edge server to provide services to multiple slave robots (SRs) and the SRs are responsible for the environment sensing and data collection. To save energy and prolong the function time of the system, two schemes are proposed to optimize the computation and communication resources, respectively. In the first scheme, the energy consumption of SRs is minimized and balanced while guaranteeing that the tasks are accomplished under a time constraint. In the second scheme, not only the energy consumption, but also the remaining energies of the SRs are considered to enhance the robustness of the system. Through the analysis and numerical simulations, we demonstrate that even though the first policy may guarantee the minimization on the total SRs' energy consumption, the function time of MRC system by the second scheme is longer than that by the first one.