 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeST-ReP: Learning Predictive Representations Efficiently for Spatial-Temporal Forecasting
Dec 19, 2024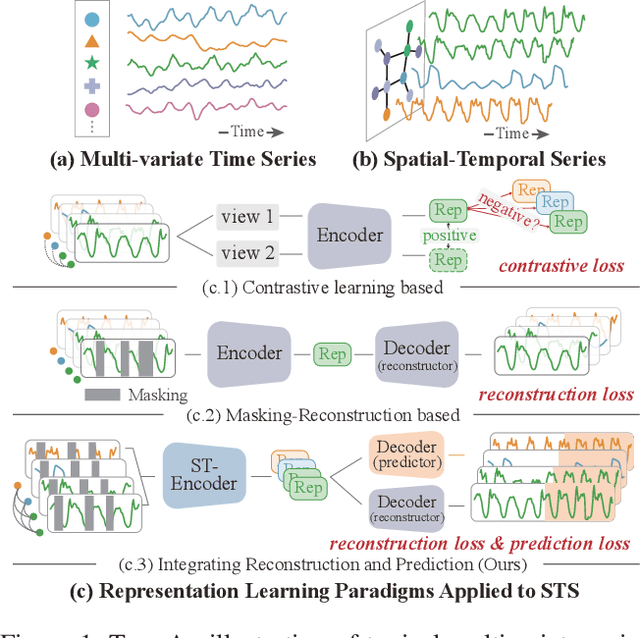
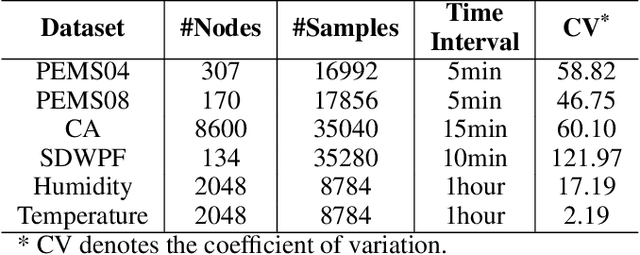
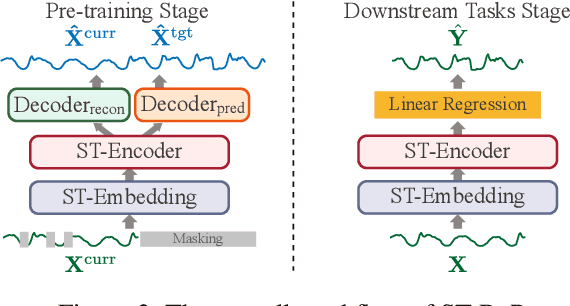
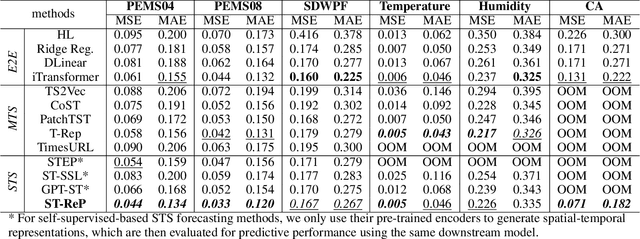
Spatial-temporal forecasting is crucial and widely applicable in various domains such as traffic, energy, and climate. Benefiting from the abundance of unlabeled spatial-temporal data, self-supervised methods are increasingly adapted to learn spatial-temporal representations. However, it encounters three key challenges: 1) the difficulty in selecting reliable negative pairs due to the homogeneity of variables, hindering contrastive learning methods; 2) overlooking spatial correlations across variables over time; 3) limitations of efficiency and scalability in existing self-supervised learning methods. To tackle these, we propose a lightweight representation-learning model ST-ReP, integrating current value reconstruction and future value prediction into the pre-training framework for spatial-temporal forecasting. And we design a new spatial-temporal encoder to model fine-grained relationships. Moreover, multi-time scale analysis is incorporated into the self-supervised loss to enhance predictive capability. Experimental results across diverse domains demonstrate that the proposed model surpasses pre-training-based baselines, showcasing its ability to learn compact and semantically enriched representations while exhibiting superior scalability.
Spatial-Temporal Interactive Dynamic Graph Convolution Network for Traffic Forecasting
May 19, 2022



Accurate traffic forecasting is essential for smart cities to achieve traffic flow control, route planning, and detection. Although many spatial-temporal methods are currently proposed, these methods are deficient in capturing the spatial-temporal dependence of traffic data synchronously. In addition, most of the methods ignore the dynamically changing correlations between road network nodes that arise as traffic data changes. To address the above challenges, we propose a neural network-based Spatial-Temporal Interactive Dynamic Graph Convolutional Network (STIDGCN) for traffic forecasting in this paper. In STIDGCN, we propose an interactive dynamic graph convolution structure, which first divides the sequences at intervals and captures the spatial-temporal dependence of the traffic data simultaneously through an interactive learning strategy for effective long-term prediction. We propose a novel dynamic graph convolution module consisting of a graph generator, fusion graph convolution. The dynamic graph convolution module can use the input traffic data, pre-defined graph structure to generate a graph structure and fuse it with the defined adaptive adjacency matrix, which is used to achieve the filling of the pre-defined graph structure and simulate the generation of dynamic associations between nodes in the road network. Extensive experiments on four real-world traffic flow datasets demonstrate that STIDGCN outperforms the state-of-the-art baseline.