 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent model for offshore China sea fog forecasting
Jul 20, 2023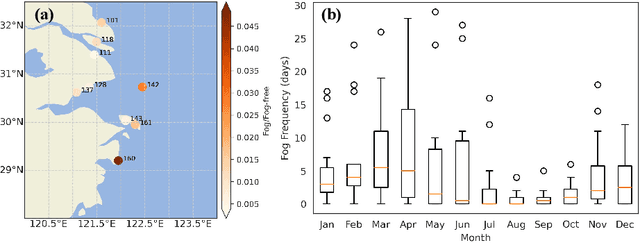
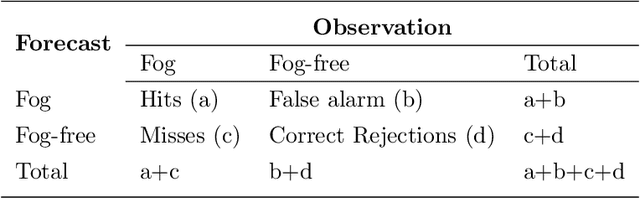
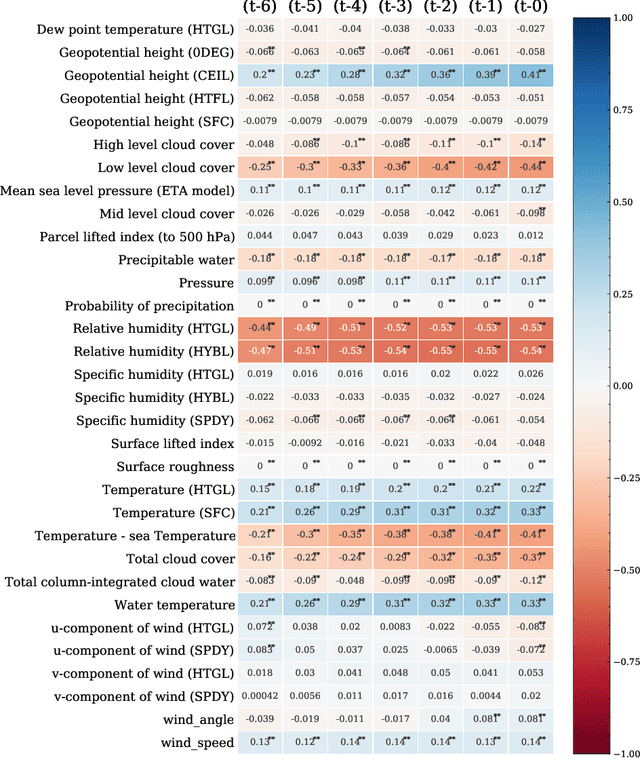
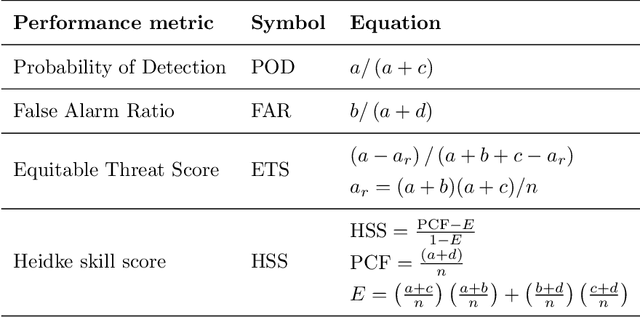
Accurate and timely prediction of sea fog is very important for effectively managing maritime and coastal economic activities. Given the intricate nature and inherent variability of sea fog, traditional numerical and statistical forecasting methods are often proven inadequate. This study aims to develop an advanced sea fog forecasting method embedded in a numerical weather prediction model using the Yangtze River Estuary (YRE) coastal area as a case study. Prior to training our machine learning model, we employ a time-lagged correlation analysis technique to identify key predictors and decipher the underlying mechanisms driving sea fog occurrence. In addition, we implement ensemble learning and a focal loss function to address the issue of imbalanced data, thereby enhancing the predictive ability of our model. To verify the accuracy of our method, we evaluate its performance using a comprehensive dataset spanning one year, which encompasses both weather station observations and historical forecasts. Remarkably, our machine learning-based approach surpasses the predictive performance of two conventional methods, the weather research and forecasting nonhydrostatic mesoscale model (WRF-NMM) and the algorithm developed by the National Oceanic and Atmospheric Administration (NOAA) Forecast Systems Laboratory (FSL). Specifically, in regard to predicting sea fog with a visibility of less than or equal to 1 km with a lead time of 60 hours, our methodology achieves superior results by increasing the probability of detection (POD) while simultaneously reducing the false alarm ratio (FAR).
Decentralized Global Connectivity Maintenance for Multi-Robot Navigation: A Reinforcement Learning Approach
Sep 17, 2021
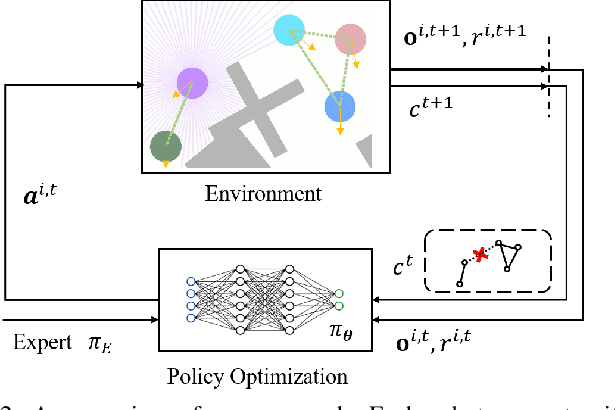
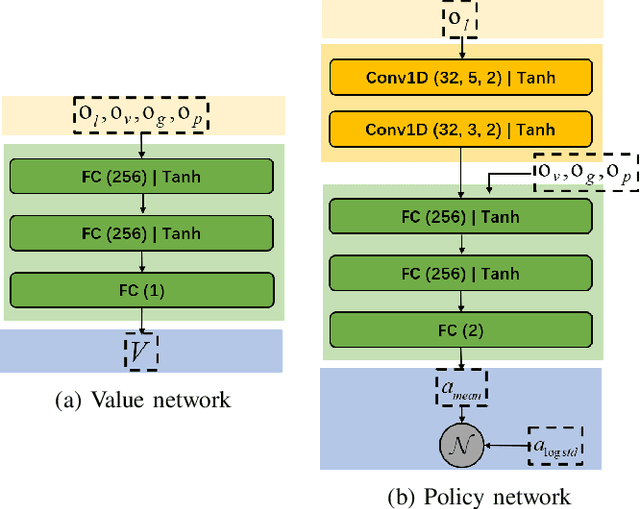
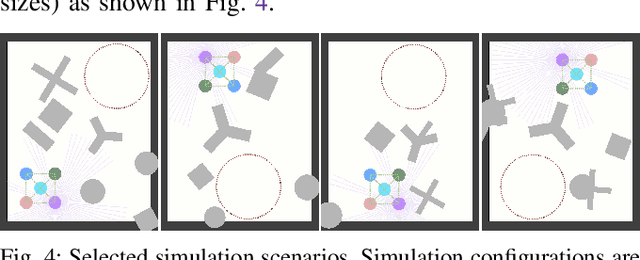
The problem of multi-robot navigation of connectivity maintenance is challenging in multi-robot applications. This work investigates how to navigate a multi-robot team in unknown environments while maintaining connectivity. We propose a reinforcement learning (RL) approach to develop a decentralized policy, which is shared among multiple robots. Given range sensor measurements and the positions of other robots, the policy aims to generate control commands for navigation and preserve the global connectivity of the robot team. We incorporate connectivity concerns into the RL framework as constraints and introduce behavior cloning to reduce the exploration complexity of policy optimization. The policy is optimized with all transition data collected by multiple robots in random simulated scenarios. We validate the effectiveness of the proposed approach by comparing different combinations of connectivity constraints and behavior cloning. We also show that our policy can generalize to unseen scenarios in both simulation and holonomic robots experiments.