 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpectraDINO: Bridging the Spectral Gap in Vision Foundation Models via Lightweight Adapters
May 04, 2026Vision Foundation Models (VFMs) pretrained on large-scale RGB data have demonstrated remarkable representation quality, yet their applicability to multispectral imaging spanning Near-Infrared (NIR), Short-Wave Infrared (SWIR), and Long-Wave Infrared (LWIR) remains largely unexplored. These spectral modalities offer complementary sensing capabilities critical for robust perception in adverse conditions, but present a fundamental domain gap relative to RGB-centric pretrained models. We present SpectraDINO, a multispectral VFM that bridges this spectral gap by extending DINOv2 ViT backbones to beyond-visible modalities through lightweight, per-modality bottleneck adapters, while preserving the rich representations of the frozen RGB backbone. We introduce a multi-stage teacher-student training protocol in which a frozen DINOv2 teacher guides a spectral student via cosine distillation, symmetric contrastive loss, patch-level alignment, and a novel neighborhood-structure-preservation loss. This staged curriculum enables strong cross-modal alignment without catastrophic forgetting of RGB priors. We evaluate SpectraDINO on multispectral object detection and semantic segmentation across challenging NIR, SWIR, and LWIR benchmarks using widely adopted fusion strategies. SpectraDINO achieves state-of-the-art performance across most benchmarks, validating its effectiveness as a general-purpose backbone for spectral generalization. The code and weights for model variants are available at https://github.com/Yonsei-STL/SpectraDINO.
RPT-SR: Regional Prior attention Transformer for infrared image Super-Resolution
Feb 17, 2026General-purpose super-resolution models, particularly Vision Transformers, have achieved remarkable success but exhibit fundamental inefficiencies in common infrared imaging scenarios like surveillance and autonomous driving, which operate from fixed or nearly-static viewpoints. These models fail to exploit the strong, persistent spatial priors inherent in such scenes, leading to redundant learning and suboptimal performance. To address this, we propose the Regional Prior attention Transformer for infrared image Super-Resolution (RPT-SR), a novel architecture that explicitly encodes scene layout information into the attention mechanism. Our core contribution is a dual-token framework that fuses (1) learnable, regional prior tokens, which act as a persistent memory for the scene's global structure, with (2) local tokens that capture the frame-specific content of the current input. By utilizing these tokens into an attention, our model allows the priors to dynamically modulate the local reconstruction process. Extensive experiments validate our approach. While most prior works focus on a single infrared band, we demonstrate the broad applicability and versatility of RPT-SR by establishing new state-of-the-art performance across diverse datasets covering both Long-Wave (LWIR) and Short-Wave (SWIR) spectra
RASMD: RGB And SWIR Multispectral Driving Dataset for Robust Perception in Adverse Conditions
Apr 10, 2025Current autonomous driving algorithms heavily rely on the visible spectrum, which is prone to performance degradation in adverse conditions like fog, rain, snow, glare, and high contrast. Although other spectral bands like near-infrared (NIR) and long-wave infrared (LWIR) can enhance vision perception in such situations, they have limitations and lack large-scale datasets and benchmarks. Short-wave infrared (SWIR) imaging offers several advantages over NIR and LWIR. However, no publicly available large-scale datasets currently incorporate SWIR data for autonomous driving. To address this gap, we introduce the RGB and SWIR Multispectral Driving (RASMD) dataset, which comprises 100,000 synchronized and spatially aligned RGB-SWIR image pairs collected across diverse locations, lighting, and weather conditions. In addition, we provide a subset for RGB-SWIR translation and object detection annotations for a subset of challenging traffic scenarios to demonstrate the utility of SWIR imaging through experiments on both object detection and RGB-to-SWIR image translation. Our experiments show that combining RGB and SWIR data in an ensemble framework significantly improves detection accuracy compared to RGB-only approaches, particularly in conditions where visible-spectrum sensors struggle. We anticipate that the RASMD dataset will advance research in multispectral imaging for autonomous driving and robust perception systems.
Pix2Next: Leveraging Vision Foundation Models for RGB to NIR Image Translation
Sep 25, 2024This paper proposes Pix2Next, a novel image-to-image translation framework designed to address the challenge of generating high-quality Near-Infrared (NIR) images from RGB inputs. Our approach leverages a state-of-the-art Vision Foundation Model (VFM) within an encoder-decoder architecture, incorporating cross-attention mechanisms to enhance feature integration. This design captures detailed global representations and preserves essential spectral characteristics, treating RGB-to-NIR translation as more than a simple domain transfer problem. A multi-scale PatchGAN discriminator ensures realistic image generation at various detail levels, while carefully designed loss functions couple global context understanding with local feature preservation. We performed experiments on the RANUS dataset to demonstrate Pix2Next's advantages in quantitative metrics and visual quality, improving the FID score by 34.81% compared to existing methods. Furthermore, we demonstrate the practical utility of Pix2Next by showing improved performance on a downstream object detection task using generated NIR data to augment limited real NIR datasets. The proposed approach enables the scaling up of NIR datasets without additional data acquisition or annotation efforts, potentially accelerating advancements in NIR-based computer vision applications.
Monocular Vision-based Prediction of Cut-in Maneuvers with LSTM Networks
Mar 21, 2022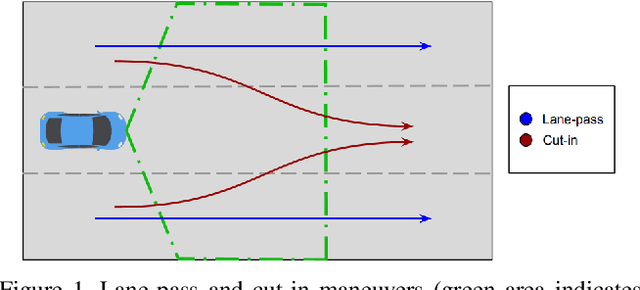
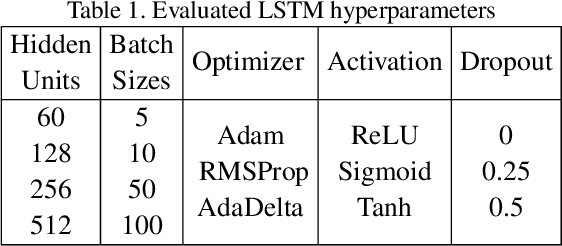
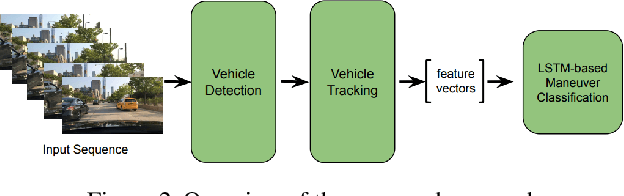
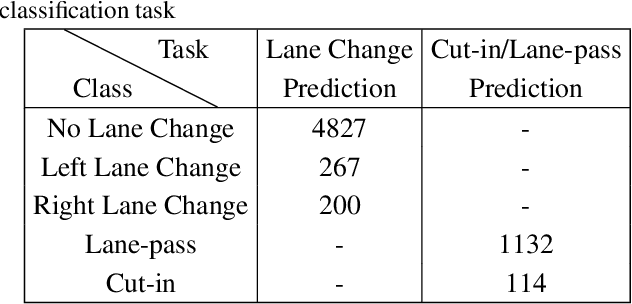
Advanced driver assistance and automated driving systems should be capable of predicting and avoiding dangerous situations. This study proposes a method to predict potentially dangerous cut-in maneuvers happening in the ego lane. We follow a computer vision-based approach that only employs a single in-vehicle RGB camera, and we classify the target vehicle's maneuver based on the recent video frames. Our algorithm consists of a CNN-based vehicle detection and tracking step and an LSTM-based maneuver classification step. It is more computationally efficient than other vision-based methods since it exploits a small number of features for the classification step rather than feeding CNNs with RGB frames. We evaluated our approach on a publicly available driving dataset and a lane change detection dataset. We obtained 0.9585 accuracy with side-aware two-class (cut-in vs. lane-pass) classification models. Experiment results also reveal that our approach outperforms state-of-the-art approaches when used for lane change detection.