 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular Vision-based Prediction of Cut-in Maneuvers with LSTM Networks
Paper and Code
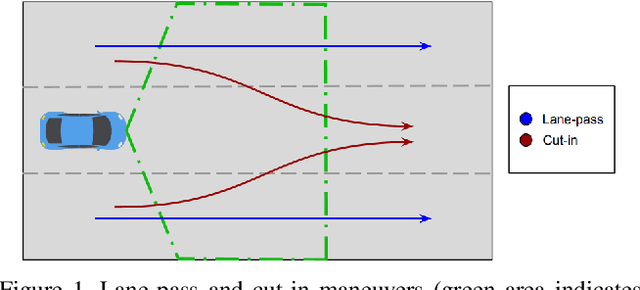
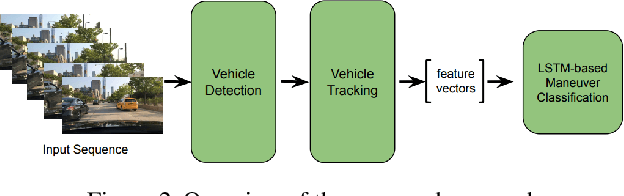
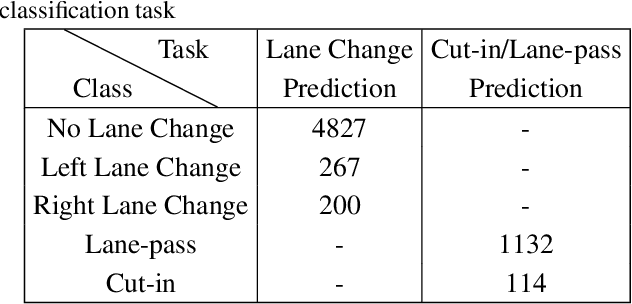
Advanced driver assistance and automated driving systems should be capable of predicting and avoiding dangerous situations. This study proposes a method to predict potentially dangerous cut-in maneuvers happening in the ego lane. We follow a computer vision-based approach that only employs a single in-vehicle RGB camera, and we classify the target vehicle's maneuver based on the recent video frames. Our algorithm consists of a CNN-based vehicle detection and tracking step and an LSTM-based maneuver classification step. It is more computationally efficient than other vision-based methods since it exploits a small number of features for the classification step rather than feeding CNNs with RGB frames. We evaluated our approach on a publicly available driving dataset and a lane change detection dataset. We obtained 0.9585 accuracy with side-aware two-class (cut-in vs. lane-pass) classification models. Experiment results also reveal that our approach outperforms state-of-the-art approaches when used for lane change detection.