 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpInf-LLM: Parametric PDE Solving with LLMs via Operator Inference
Feb 02, 2026Solving diverse partial differential equations (PDEs) is fundamental in science and engineering. Large language models (LLMs) have demonstrated strong capabilities in code generation, symbolic reasoning, and tool use, but reliably solving PDEs across heterogeneous settings remains challenging. Prior work on LLM-based code generation and transformer-based foundation models for PDE learning has shown promising advances. However, a persistent trade-off between execution success rate and numerical accuracy arises, particularly when generalization to unseen parameters and boundary conditions is required. In this work, we propose OpInf-LLM, an LLM parametric PDE solving framework based on operator inference. The proposed framework leverages a small amount of solution data to enable accurate prediction of diverse PDE instances, including unseen parameters and configurations, and provides seamless integration with LLMs for natural language specification of PDE solving tasks. Its low computational demands and unified tool interface further enable a high execution success rate across heterogeneous settings. By combining operator inference with LLM capabilities, OpInf-LLM opens new possibilities for generalizable reduced-order modeling in LLM-based PDE solving.
Context-aware LLM-based Safe Control Against Latent Risks
Mar 18, 2024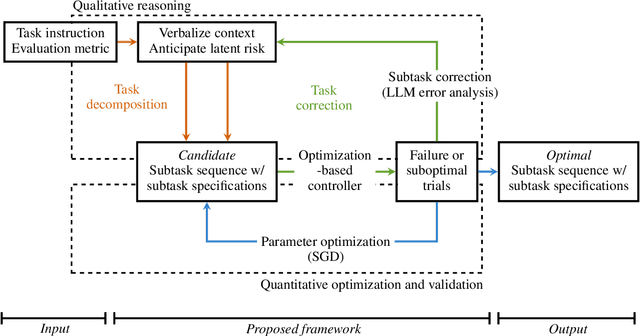
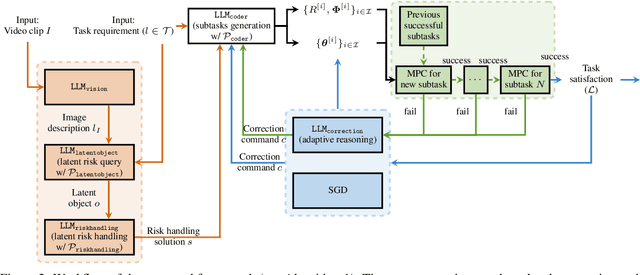
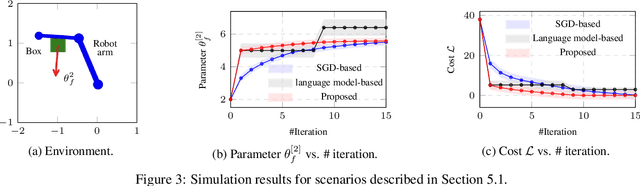
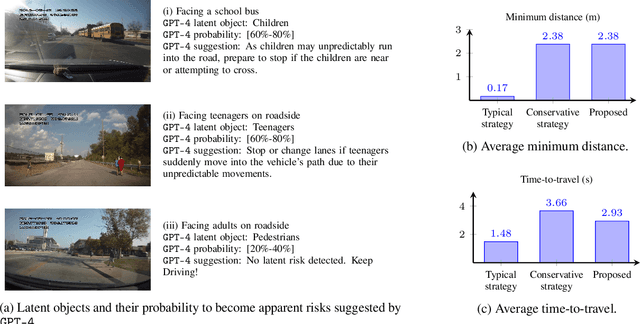
It is challenging for autonomous control systems to perform complex tasks in the presence of latent risks. Motivated by this challenge, this paper proposes an integrated framework that involves Large Language Models (LLMs), stochastic gradient descent (SGD), and optimization-based control. In the first phrase, the proposed framework breaks down complex tasks into a sequence of smaller subtasks, whose specifications account for contextual information and latent risks. In the second phase, these subtasks and their parameters are refined through a dual process involving LLMs and SGD. LLMs are used to generate rough guesses and failure explanations, and SGD is used to fine-tune parameters. The proposed framework is tested using simulated case studies of robots and vehicles. The experiments demonstrate that the proposed framework can mediate actions based on the context and latent risks and learn complex behaviors efficiently.
A Learning and Control Perspective for Microfinance
Jul 26, 2022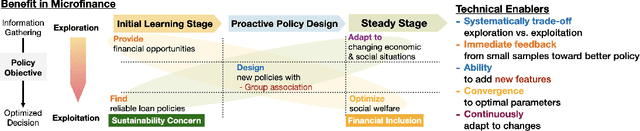
Microfinance in developing areas such as Africa has been proven to improve the local economy significantly. However, many applicants in developing areas cannot provide adequate information required by the financial institution to make a lending decision. As a result, it is challenging for microfinance institutions to assign credit properly based on conventional policies. In this paper, we formulate the decision-making of microfinance into a rigorous optimization-based framework involving learning and control. We propose an algorithm to explore and learn the optimal policy to approve or reject applicants. We provide the conditions under which the algorithms are guaranteed to converge to an optimal one. The proposed algorithm can naturally deal with missing information and systematically tradeoff multiple objectives such as profit maximization, financial inclusion, social benefits, and economic development. Through extensive simulation of both real and synthetic microfinance datasets, we showed our proposed algorithm is superior to existing benchmarks. To the best of our knowledge, this paper is the first to make a connection between microfinance and control and use control-theoretic tools to optimize the policy with a provable guarantee.