 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometrical portrait of Multipath error propagation in GNSS Direct Position Estimation
Jul 24, 2025Direct Position Estimation (DPE) is a method that directly estimate position, velocity, and time (PVT) information from cross ambiguity function (CAF) of the GNSS signals, significantly enhancing receiver robustness in urban environments. However, there is still a lack of theoretical characterization on multipath errors in the context of DPE theory. Geometric observations highlight the unique characteristics of DPE errors stemming from multipath and thermal noise as estimation bias and variance respectively. Expanding upon the theoretical framework of DPE noise variance through geometric analysis, this paper focuses on a geometric representation of multipath errors by quantifying the deviations in CAF and PVT solutions caused by off-centering bias relative to the azimuth and elevation angles. A satellite circular multipath bias (SCMB) model is introduced, amalgamating CAF and PVT errors from multiple satellite channels. The boundaries for maximum or minimum PVT bias are established through discussions encompassing various multipath conditions. The correctness of the multipath geometrical portrait is confirmed through both Monte Carlo simulations and urban canyon tests. The findings indicate that the maximum PVT bias depends on the largest multipath errors observed across various satellite channels. Additionally, the PVT bias increases with satellite elevation angles, influenced by the CAF multipath bias projection. This serves as a reference for selecting DPE satellites from a geometric standpoint, underscoring the importance of choosing a balanced combination of high and low elevation angles to achieve an optimal satellite geometry configuration.
An Accelerated Camera 3DMA Framework for Efficient Urban GNSS Multipath Estimation
Apr 23, 2025Robust GNSS positioning in urban environments is still plagued by multipath effects, particularly due to the complex signal propagation induced by ubiquitous surfaces with varied radio frequency reflectivities. Current 3D Mapping Aided (3DMA) GNSS techniques show great potentials in mitigating multipath but face a critical trade-off between computational efficiency and modeling accuracy. Most approaches often rely on offline outdated or oversimplified 3D maps, while real-time LiDAR-based reconstruction boasts high accuracy, it is problematic in low laser reflectivity conditions; camera 3DMA is a good candidate to balance accuracy and efficiency but current methods suffer from extremely low reconstruction speed, a far cry from real-time multipath-mitigated navigation. This paper proposes an accelerated framework incorporating camera multi-view stereo (MVS) reconstruction and ray tracing. By hypothesizing on surface textures, an orthogonal visual feature fusion framework is proposed, which robustly addresses both texture-rich and texture-poor surfaces, lifting off the reflectivity challenges in visual reconstruction. A polygonal surface modeling scheme is further integrated to accurately delineate complex building boundaries, enhancing the reconstruction granularity. To avoid excessively accurate reconstruction, reprojected point cloud multi-plane fitting and two complexity control strategies are proposed, thus improving upon multipath estimation speed. Experiments were conducted in Lujiazui, Shanghai, a typical multipath-prone district. The results show that the method achieves an average reconstruction accuracy of 2.4 meters in dense urban environments featuring glass curtain wall structures, a traditionally tough case for reconstruction, and achieves a ray-tracing-based multipath correction rate of 30 image frames per second, 10 times faster than the contemporary benchmarks.
Weiss-Weinstein bound of frequency estimation error for very weak GNSS signals
Jan 11, 2024Tightness remains the center quest in all modern estimation bounds. For very weak signals, this is made possible with judicial choices of prior probability distribution and bound family. While current bounds in GNSS assess performance of carrier frequency estimators under Gaussian or uniform assumptions, the circular nature of frequency is overlooked. In addition, of all bounds in Bayesian framework, Weiss-Weinstein bound (WWB) stands out since it is free from regularity conditions or requirements on the prior distribution. Therefore, WWB is extended for the current frequency estimation problem. A divide-and-conquer type of hyperparameter tuning method is developed to level off the curse of computational complexity for the WWB family while enhancing tightness. Synthetic results show that with von Mises as prior probability distribution, WWB provides a bound up to 22.5% tighter than Ziv-Zaka\"i bound (ZZB) when SNR varies between -3.5 dB and -20 dB, where GNSS signal is deemed extremely weak.
GICI-LIB: A GNSS/INS/Camera Integrated Navigation Library
Jun 23, 2023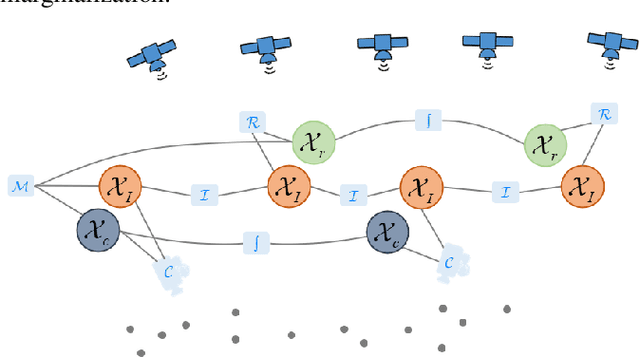
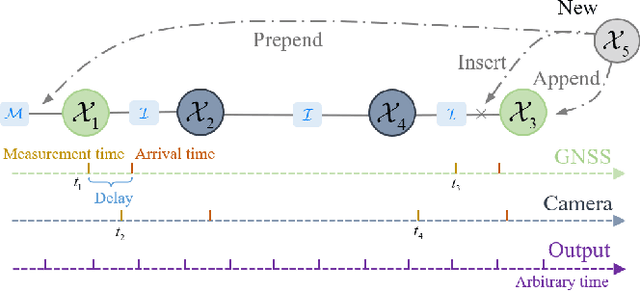
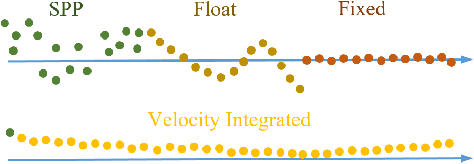
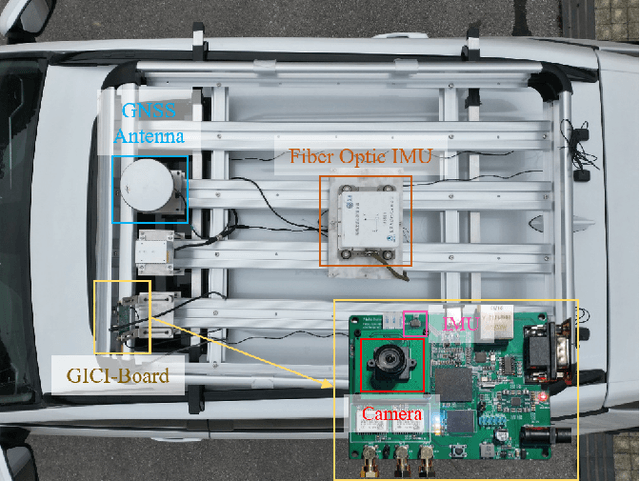
Accurate navigation is essential for autonomous robots and vehicles. In recent years, the integration of the Global Navigation Satellite System (GNSS), Inertial Navigation System (INS), and camera has garnered considerable attention due to its robustness and high accuracy in diverse environments. In such systems, fully utilizing the role of GNSS is cumbersome because of the diverse choices of formulations, error models, satellite constellations, signal frequencies, and service types, which lead to different precision, robustness, and usage dependencies. To clarify the capacity of GNSS algorithms and accelerate the development efficiency of employing GNSS in multi-sensor fusion algorithms, we open source the GNSS/INS/Camera Integration Library (GICI-LIB), together with detailed documentation and a comprehensive land vehicle dataset. A factor graph optimization-based multi-sensor fusion framework is established, which combines almost all GNSS measurement error sources by fully considering temporal and spatial correlations between measurements. The graph structure is designed for flexibility, making it easy to form any kind of integration algorithm. For illustration, four Real-Time Kinematic (RTK)-based algorithms from GICI-LIB are evaluated using our dataset. Results confirm the potential of the GICI system to provide continuous precise navigation solutions in a wide spectrum of urban environments.
Robust Extrinsic Self-Calibration of Camera and Solid State LiDAR
Feb 13, 2023This letter proposes an extrinsic calibration approach for a pair of monocular camera and prism-spinning solid-state LiDAR. The unique characteristics of the point cloud measured resulting from the flower-like scanning pattern is first disclosed as the vacant points, a type of outlier between foreground target and background objects. Unlike existing method using only depth continuous measurements, we use depth discontinuous measurements to retain more valid features and efficiently remove vacant points. The larger number of detected 3D corners thus contain more robust a priori information than usual which, together with the 2D corners detected by overlapping cameras and constrained by the proposed circularity and rectangularity rules, produce accurate extrinsic estimates. The algorithm is evaluated with real field experiments adopting both qualitative and quantitative performance criteria, and found to be superior to existing algorithms. The code is available on GitHub.