 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinematic Parameter Optimization of a Miniaturized Surgical Instrument Based on Dexterous Workspace Determination
Jul 08, 2021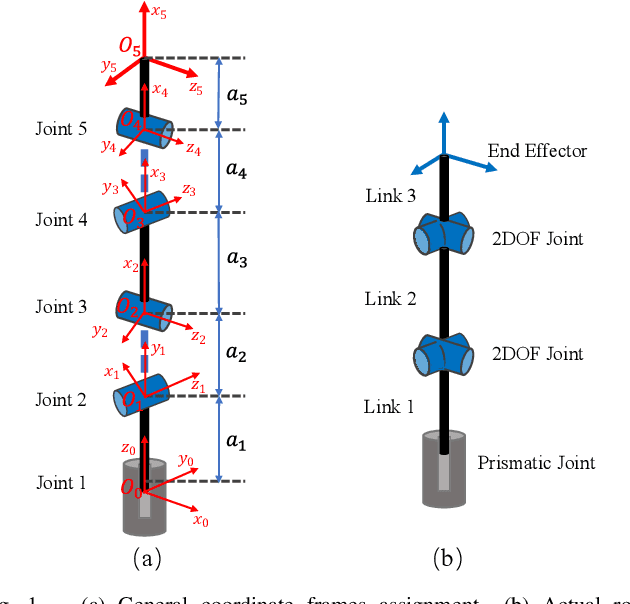
Miniaturized instruments are highly needed for robot assisted medical healthcare and treatment, especially for less invasive surgery as it empowers more flexible access to restricted anatomic intervention. But the robotic design is more challenging due to the contradictory needs of miniaturization and the capability of manipulating with a large dexterous workspace. Thus, kinematic parameter optimization is of great significance in this case. To this end, this paper proposes an approach based on dexterous workspace determination for designing a miniaturized tendon-driven surgical instrument under necessary restraints. The workspace determination is achieved by boundary determination and volume estimation with partition and least-squares polynomial fitting methods. The final robotic configuration with optimized kinematic parameters is proved to be eligible with a large enough dexterous workspace and targeted miniature size.