 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNested-TNT: Hierarchical Vision Transformers with Multi-Scale Feature Processing
Apr 20, 2024
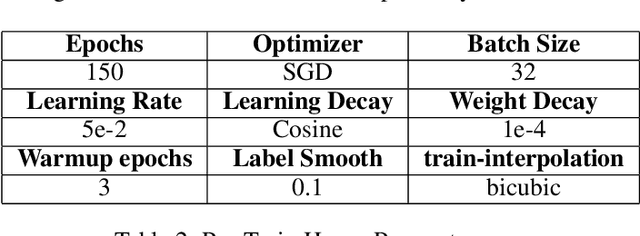


Transformer has been applied in the field of computer vision due to its excellent performance in natural language processing, surpassing traditional convolutional neural networks and achieving new state-of-the-art. ViT divides an image into several local patches, known as "visual sentences". However, the information contained in the image is vast and complex, and focusing only on the features at the "visual sentence" level is not enough. The features between local patches should also be taken into consideration. In order to achieve further improvement, the TNT model is proposed, whose algorithm further divides the image into smaller patches, namely "visual words," achieving more accurate results. The core of Transformer is the Multi-Head Attention mechanism, and traditional attention mechanisms ignore interactions across different attention heads. In order to reduce redundancy and improve utilization, we introduce the nested algorithm and apply the Nested-TNT to image classification tasks. The experiment confirms that the proposed model has achieved better classification performance over ViT and TNT, exceeding 2.25%, 1.1% on dataset CIFAR10 and 2.78%, 0.25% on dataset FLOWERS102 respectively.
GPT-Lab: Next Generation Of Optimal Chemistry Discovery By GPT Driven Robotic Lab
Sep 15, 2023The integration of robots in chemical experiments has enhanced experimental efficiency, but lacking the human intelligence to comprehend literature, they seldom provide assistance in experimental design. Therefore, achieving full-process autonomy from experiment design to validation in self-driven laboratories (SDL) remains a challenge. The introduction of Generative Pre-trained Transformers (GPT), particularly GPT-4, into robotic experimentation offers a solution. We introduce GPT-Lab, a paradigm that employs GPT models to give robots human-like intelligence. With our robotic experimentation platform, GPT-Lab mines literature for materials and methods and validates findings through high-throughput synthesis. As a demonstration, GPT-Lab analyzed 500 articles, identified 18 potential reagents, and successfully produced an accurate humidity colorimetric sensor with a root mean square error (RMSE) of 2.68%. This showcases the rapid materials discovery and validation potential of our system.