 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-talk based multi-task learning for fault classification of physically coupled machine system
Feb 05, 2026Machine systems inherently generate signals in which fault conditions and various physical variables are physically coupled. Although many existing fault classification studies rely solely on direct fault labels, the aforementioned signals naturally embed additional information shaped by other physically coupled information. Herein, we leverage this coupling through a multi-task learning (MTL) framework that jointly learns fault conditions and the related physical variables. Among MTL architectures, crosstalk structures have distinct advantages because they allow for controlled information exchange between tasks through the cross-talk layer while preventing negative transfer, in contrast to shared trunk architectures that often mix incompatible features. We build on our previously introduced residual neural dimension reductor model, and extend its application to two benchmarks where physical coupling is prominent. The first benchmark is a drone fault dataset, in which machine type and maneuvering direction significantly alter the frequency components of measured signals even under the same nominal condition. By learning fault classification together with these physical attributes, the cross-talk architecture can better classify faults. The second benchmark dataset is the motor compound fault dataset. In this system, each fault component, inner race fault, outer race fault, misalignment, and unbalance is coupled to the other. For motor compound fault, we also test classification performance when we use single-channel data or multi-channel data as input to the classifier. Across both benchmarks, our residual neural dimension reductor, consistently outperformed single-task models, multi-class models that merge all label combinations, and shared trunk multi-task models.
Multi-output Classification using a Cross-talk Architecture for Compound Fault Diagnosis of Motors in Partially Labeled Condition
May 29, 2025The increasing complexity of rotating machinery and the diversity of operating conditions, such as rotating speed and varying torques, have amplified the challenges in fault diagnosis in scenarios requiring domain adaptation, particularly involving compound faults. This study addresses these challenges by introducing a novel multi-output classification (MOC) framework tailored for domain adaptation in partially labeled (PL) target datasets. Unlike conventional multi-class classification (MCC) approaches, the proposed MOC framework classifies the severity levels of compound faults simultaneously. Furthermore, we explore various single-task and multi-task architectures applicable to the MOC formulation-including shared trunk and cross-talk-based designs-for compound fault diagnosis under PL conditions. Based on this investigation, we propose a novel cross-talk layer structure that enables selective information sharing across diagnostic tasks, effectively enhancing classification performance in compound fault scenarios. In addition, frequency-layer normalization was incorporated to improve domain adaptation performance on motor vibration data. Compound fault conditions were implemented using a motor-based test setup, and the proposed model was evaluated across six domain adaptation scenarios. The experimental results demonstrate its superior macro F1 performance compared to baseline models. We further showed that the proposed mode's structural advantage is more pronounced in compound fault settings through a single-fault comparison. We also found that frequency-layer normalization fits the fault diagnosis task better than conventional methods. Lastly, we discuss that this improvement primarily stems from the model's structural ability to leverage inter-fault classification task interactions, rather than from a simple increase in model parameters.
Multi-output Classification Framework and Frequency Layer Normalization for Compound Fault Diagnosis in Motor
Apr 15, 2025This work introduces a multi-output classification (MOC) framework designed for domain adaptation in fault diagnosis, particularly under partially labeled (PL) target domain scenarios and compound fault conditions in rotating machinery. Unlike traditional multi-class classification (MCC) methods that treat each fault combination as a distinct class, the proposed approach independently estimates the severity of each fault type, improving both interpretability and diagnostic accuracy. The model incorporates multi-kernel maximum mean discrepancy (MK-MMD) and entropy minimization (EM) losses to facilitate feature transfer from the source to the target domain. In addition, frequency layer normalization (FLN) is applied to preserve structural properties in the frequency domain, which are strongly influenced by system dynamics and are often stationary with respect to changes in rpm. Evaluations across six domain adaptation cases with PL data demonstrate that MOC outperforms baseline models in macro F1 score. Moreover, MOC consistently achieves better classification performance for individual fault types, and FLN shows superior adaptability compared to other normalization techniques.
Multi-output Classification for Compound Fault Diagnosis in Motor under Partially Labeled Target Domain
Mar 15, 2025This study presents a novel multi-output classification (MOC) framework designed for domain adaptation in fault diagnosis, addressing challenges posed by partially labeled (PL) target domain dataset and coexisting faults in rotating machinery. Unlike conventional multi-class classification (MCC) approaches, the MOC framework independently classifies the severity of each fault, enhancing diagnostic accuracy. By integrating multi-kernel maximum mean discrepancy loss (MKMMD) and entropy minimization loss (EM), the proposed method improves feature transferability between source and target domains, while frequency layer normalization (FLN) effectively handles stationary vibration signals by leveraging mechanical characteristics. Experimental evaluations across six domain adaptation cases, encompassing partially labeled (PL) scenarios, demonstrate the superior performance of the MOC approach over baseline methods in terms of macro F1 score.
Performance Metric for Multiple Anomaly Score Distributions with Discrete Severity Levels
Aug 09, 2024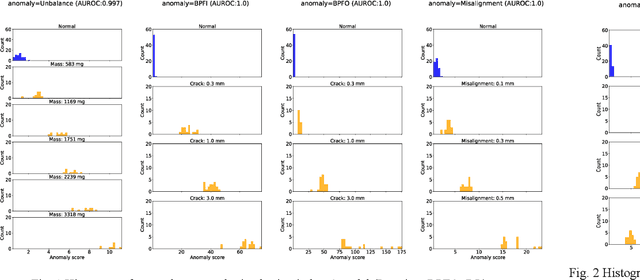
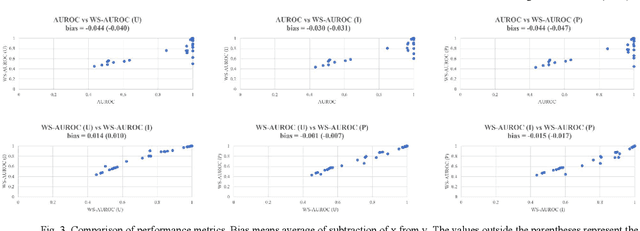
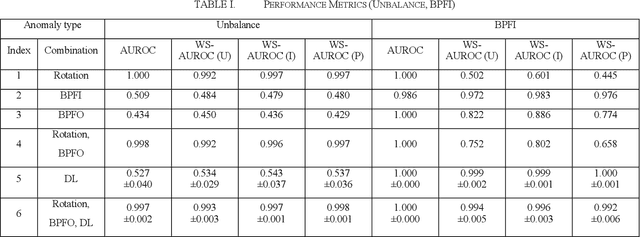
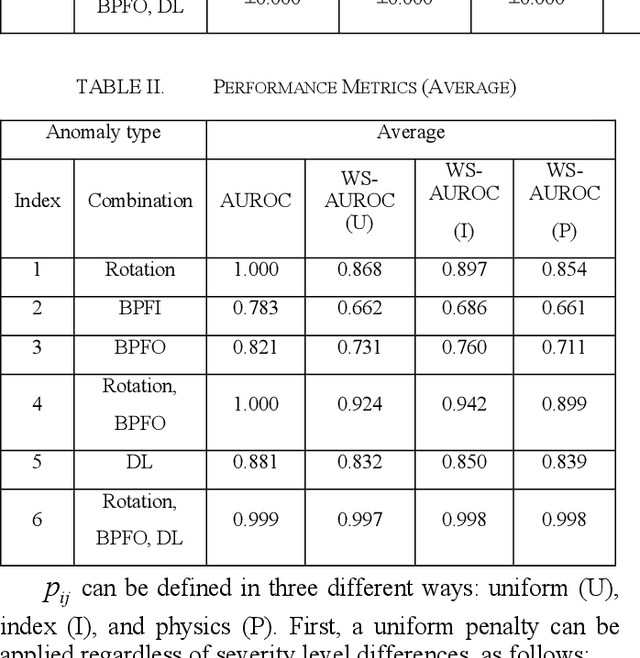
The rise of smart factories has heightened the demand for automated maintenance, and normal-data-based anomaly detection has proved particularly effective in environments where anomaly data are scarce. This method, which does not require anomaly data during training, has prompted researchers to focus not only on detecting anomalies but also on classifying severity levels by using anomaly scores. However, the existing performance metrics, such as the area under the receiver operating characteristic curve (AUROC), do not effectively reflect the performance of models in classifying severity levels based on anomaly scores. To address this limitation, we propose the weighted sum of the area under the receiver operating characteristic curve (WS-AUROC), which combines AUROC with a penalty for severity level differences. We conducted various experiments using different penalty assignment methods: uniform penalty regardless of severity level differences, penalty based on severity level index differences, and penalty based on actual physical quantities that cause anomalies. The latter method was the most sensitive. Additionally, we propose an anomaly detector that achieves clear separation of distributions and outperforms the ablation models on the WS-AUROC and AUROC metrics.
Sound-based drone fault classification using multitask learning
Apr 23, 2023



The drone has been used for various purposes, including military applications, aerial photography, and pesticide spraying. However, the drone is vulnerable to external disturbances, and malfunction in propellers and motors can easily occur. To improve the safety of drone operations, one should detect the mechanical faults of drones in real-time. This paper proposes a sound-based deep neural network (DNN) fault classifier and drone sound dataset. The dataset was constructed by collecting the operating sounds of drones from microphones mounted on three different drones in an anechoic chamber. The dataset includes various operating conditions of drones, such as flight directions (front, back, right, left, clockwise, counterclockwise) and faults on propellers and motors. The drone sounds were then mixed with noises recorded in five different spots on the university campus, with a signal-to-noise ratio (SNR) varying from 10 dB to 15 dB. Using the acquired dataset, we train a DNN classifier, 1DCNN-ResNet, that classifies the types of mechanical faults and their locations from short-time input waveforms. We employ multitask learning (MTL) and incorporate the direction classification task as an auxiliary task to make the classifier learn more general audio features. The test over unseen data reveals that the proposed multitask model can successfully classify faults in drones and outperforms single-task models even with less training data.
On-site Noise Exposure technique for noise-robust machine fault classification
Apr 07, 2023



In-situ classification of faulty sounds is an important issue in machine health monitoring and diagnosis. However, in a noisy environment such as a factory, machine sound is always mixed up with environmental noises, and noise-only periods can exist when a machine is not in operation. Therefore, a deep neural network (DNN)-based fault classifier has to be able to distinguish noise from machine sound and be robust to mixed noises. To deal with these problems, we investigate on-site noise exposure (ONE) that exposes a DNN model to the noises recorded in the same environment where the machine operates. Like the outlier exposure technique, noise exposure trains a DNN classifier to produce a uniform predicted probability distribution against noise-only data. During inference, the DNN classifier trained by ONE outputs the maximum softmax probability as the noise score and determines the noise-only period. We mix machine sound and noises of the ToyADMOS2 dataset to simulate highly noisy data. A ResNet-based classifier trained by ONE is evaluated and compared with those trained by other out-of-distribution detection techniques. The test results show that exposing a model to on-site noises can make a model more robust than using other noises or detection techniques.