 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCost of Structural Learning Under Censored Feedback: A Threshold-Bandit Approach
May 26, 2026In many multi-agent applications, tasks yield rewards only when executed by a coalition meeting an unknown size threshold; otherwise, feedback is fully censored. This censorship creates an identifiability problem: agents cannot distinguish stochastic failure from insufficient coordination. We formalize this setting as the Threshold-Activated Cooperative Multi-Armed Bandit (TAC-MAB) and analyze it under both centralized and decentralized coordination. We show that a centralized algorithm (C-TAC) achieves cumulative regret O(log T), decomposed into a structural-search term that captures the cost of resolving feasibility under censored feedback and a statistical-monitoring term for value estimation. We then introduce D-TAC, a decentralized event-triggered protocol in which agents synchronize only when their structural beliefs change. Empirically, D-TAC achieves a 23x reduction in communication relative to the centralized baseline while preserving feasibility alignment under conservative belief fusion. These results characterize the coordination cost of learning under censored feedback and show that near-centralized communication efficiency is achievable without continuous synchronization.
WORKSWORLD: A Domain for Integrated Numeric Planning and Scheduling of Distributed Pipelined Workflows
Mar 12, 2026This work pursues automated planning and scheduling of distributed data pipelines, or workflows. We develop a general workflow and resource graph representation that includes both data processing and sharing components with corresponding network interfaces for scheduling. Leveraging these graphs, we introduce WORKSWORLD, a new domain for numeric domain-independent planners designed for permanently scheduled workflows, like ingest pipelines. Our framework permits users to define data sources, available workflow components, and desired data destinations and formats without explicitly declaring the entire workflow graph as a goal. The planner solves a joint planning and scheduling problem, producing a plan that both builds the workflow graph and schedules its components on the resource graph. We empirically show that a state-of-the-art numeric planner running on commodity hardware with one hour of CPU time and 30GB of memory can solve linear-chain workflows of up to 14 components across eight sites.
Neuro-Symbolic AI in 2024: A Systematic Review
Jan 09, 2025

Background: The field of Artificial Intelligence has undergone cyclical periods of growth and decline, known as AI summers and winters. Currently, we are in the third AI summer, characterized by significant advancements and commercialization, particularly in the integration of Symbolic AI and Sub-Symbolic AI, leading to the emergence of Neuro-Symbolic AI. Methods: The review followed the PRISMA methodology, utilizing databases such as IEEE Explore, Google Scholar, arXiv, ACM, and SpringerLink. The inclusion criteria targeted peer-reviewed papers published between 2020 and 2024. Papers were screened for relevance to Neuro-Symbolic AI, with further inclusion based on the availability of associated codebases to ensure reproducibility. Results: From an initial pool of 1,428 papers, 167 met the inclusion criteria and were analyzed in detail. The majority of research efforts are concentrated in the areas of learning and inference (63%), logic and reasoning (35%), and knowledge representation (44%). Explainability and trustworthiness are less represented (28%), with Meta-Cognition being the least explored area (5%). The review identifies significant interdisciplinary opportunities, particularly in integrating explainability and trustworthiness with other research areas. Conclusion: Neuro-Symbolic AI research has seen rapid growth since 2020, with concentrated efforts in learning and inference. Significant gaps remain in explainability, trustworthiness, and Meta-Cognition. Addressing these gaps through interdisciplinary research will be crucial for advancing the field towards more intelligent, reliable, and context-aware AI systems.
Automating Transfer of Robot Task Plans using Functorial Data Migrations
Jun 22, 2024This paper introduces a novel approach to ontology-based robot plan transfer using functorial data migrations from category theory. Functors provide structured maps between domain types and predicates which can be used to transfer plans from a source domain to a target domain without the need for replanning. Unlike methods that create models for transferring specific plans, our approach can be applied to any plan within a given domain. We demonstrate this approach by transferring a task plan from the canonical Blocksworld domain to one compatible with the AI2-THOR Kitchen environment. In addition, we discuss practical applications that may enhance the adaptability of robotic task planning in general.
Encoding Compositionality in Classical Planning Solutions
Jul 13, 2021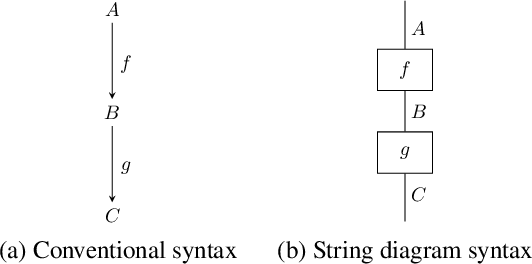
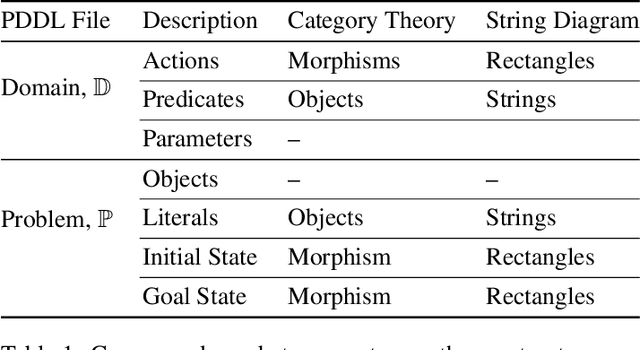
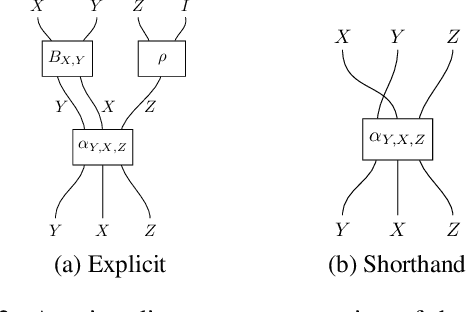
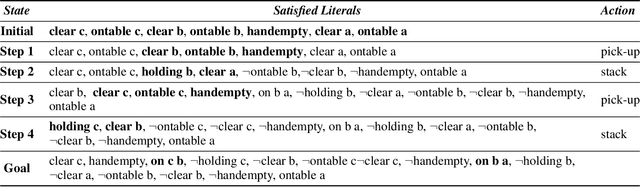
Classical AI planners provide solutions to planning problems in the form of long and opaque text outputs. To aid in the understanding transferability of planning solutions, it is necessary to have a rich and comprehensible representation for both human and computers beyond the current line-by-line text notation. In particular, it is desirable to encode the trace of literals throughout the plan to capture the dependencies between actions selected. The approach of this paper is to view the actions as maps between literals and the selected plan as a composition of those maps. The mathematical theory, called category theory, provides the relevant structures for capturing maps, their compositions, and maps between compositions. We employ this theory to propose an algorithm agnostic, model-based representation for domains, problems, and plans expressed in the commonly used planning description language, PDDL. This category theoretic representation is accompanied by a graphical syntax in addition to a linear notation, similar to algebraic expressions, that can be used to infer literals used at every step of the plan. This provides the appropriate constructive abstraction and facilitates comprehension for human operators. In this paper, we demonstrate this on a plan within the Blocksworld domain.