 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalibration of Multiple Asynchronous Microphone Arrays using Hybrid TDOA
Feb 10, 2025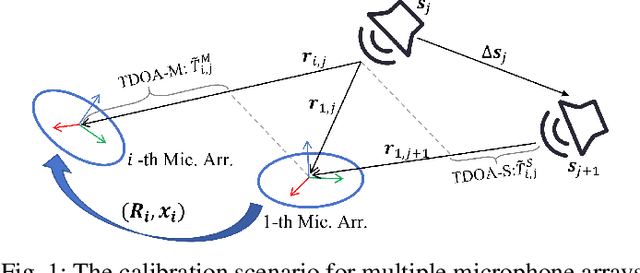
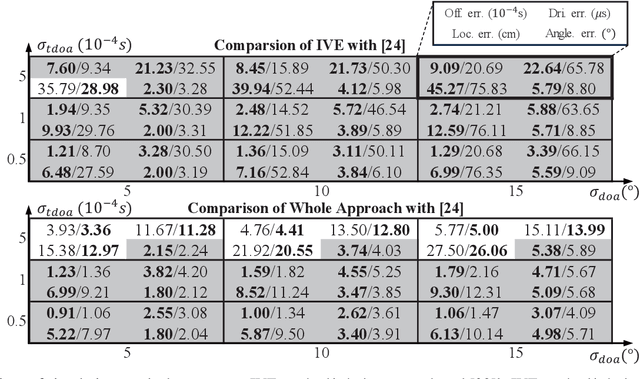
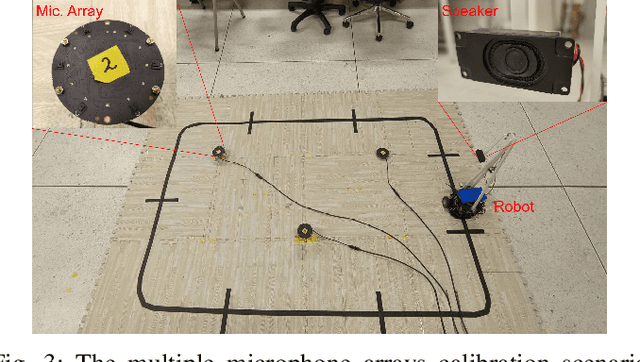
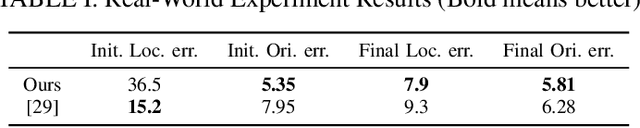
Accurate calibration of acoustic sensing systems made of multiple asynchronous microphone arrays is essential for satisfactory performance in sound source localization and tracking. State-of-the-art calibration methods for this type of system rely on the time difference of arrival and direction of arrival measurements among the microphone arrays (denoted as TDOA-M and DOA, respectively). In this paper, to enhance calibration accuracy, we propose to incorporate the time difference of arrival measurements between adjacent sound events (TDOAS) with respect to the microphone arrays. More specifically, we propose a two-stage calibration approach, including an initial value estimation (IVE) procedure and the final joint optimization step. The IVE stage first initializes all parameters except for microphone array orientations, using hybrid TDOA (i.e., TDOAM and TDOA-S), odometer data from a moving robot carrying a speaker, and DOA. Subsequently, microphone orientations are estimated through the iterative closest point method. The final joint optimization step estimates multiple microphone array locations, orientations, time offsets, clock drift rates, and sound source locations simultaneously. Both simulation and experiment results show that for scenarios with low or moderate TDOA noise levels, our approach outperforms existing methods in terms of accuracy. All code and data are available at https://github.com/AISLABsustech/Hybrid-TDOA-Multi-Calib.