 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnifying Tree-Reweighted Belief Propagation and Mean Field for Tracking Extended Targets
Dec 26, 2024This paper proposes a unified tree-reweighted belief propagation (BP) and mean field (MF) approach for scalable detection and tracking of extended targets within the framework of factor graph. The factor graph is partitioned into a BP region and an MF region so that the messages in each region are updated according to the corresponding region rules. The BP region exploits the tree-reweighted BP, which offers improved convergence than the standard BP for graphs with massive cycles, to resolve data association. The MF region approximates the posterior densities of the measurement rate, kinematic state and extent. For linear Gaussian target models and gamma Gaussian inverse Wishart distributed state density, the unified approach provides a closed-form recursion for the state density. Hence, the proposed algorithm is more efficient than particle-based BP algorithms for extended target tracking. This method also avoids measurement clustering and gating since it solves the data association problem in a probabilistic fashion. We compare the proposed approach with algorithms such as the Poisson multi-Bernoulli mixture filter and the BP-based Poisson multi-Bernoulli filter. Simulation results demonstrate that the proposed algorithm achieves enhanced tracking performance.
A Hybrid Labeled Multi-Bernoulli Filter With Amplitude For Tracking Fluctuating Targets
Sep 19, 2022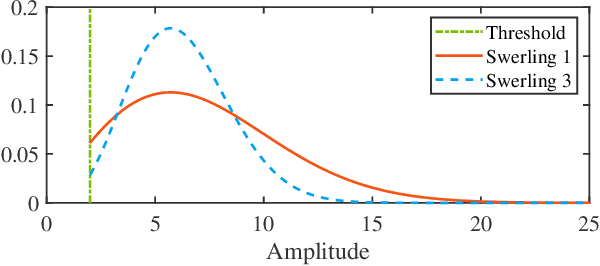
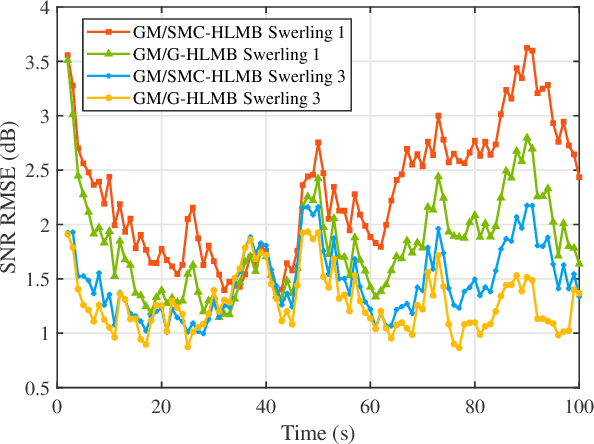
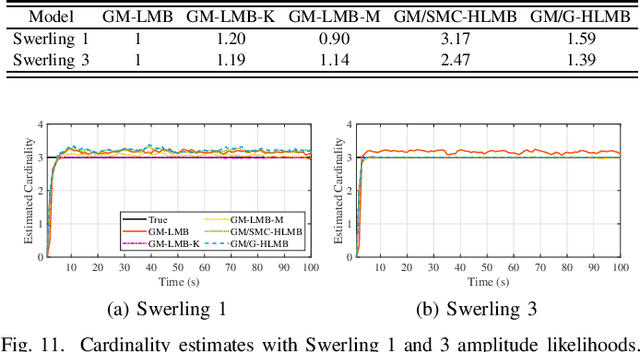

The amplitude information of target returns has been incorporated into many tracking algorithms for performance improvements. One of the limitations of employing amplitude feature is that the signal-to-noise ratio (SNR) of the target, i.e., the parameter of amplitude likelihood, is usually assumed to be known and constant. In practice, the target SNR is always unknown, and is dependent on aspect angle hence it will fluctuate. In this paper we propose a hybrid labeled multi-Bernoulli (LMB) filter that introduces the signal amplitude into the LMB filter for tracking targets with unknown and fluctuating SNR. The fluctuation of target SNR is modeled by an autoregressive gamma process and amplitude likelihoods for Swerling 1 and 3 targets are considered. Under Rao-Blackwell decomposition, an approximate Gamma estimator based on Laplace transform and Markov Chain Monte Carlo method is proposed to estimate the target SNR, and the kinematic state is estimated by a Gaussian mixture filter conditioned on the target SNR. The performance of the proposed hybrid filter is analyzed via a tracking scenario including three crossing targets. Simulation results verify the efficacy of the proposed SNR estimator and quantify the benefits of incorporating amplitude information for multi-target tracking.