 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Vehicle Interaction Scenarios Generation with Interpretable Traffic Primitives and Gaussian Process Regression
Oct 08, 2019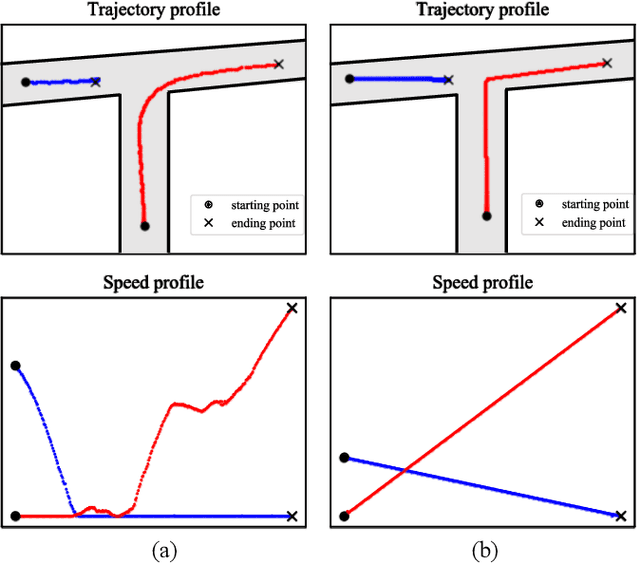

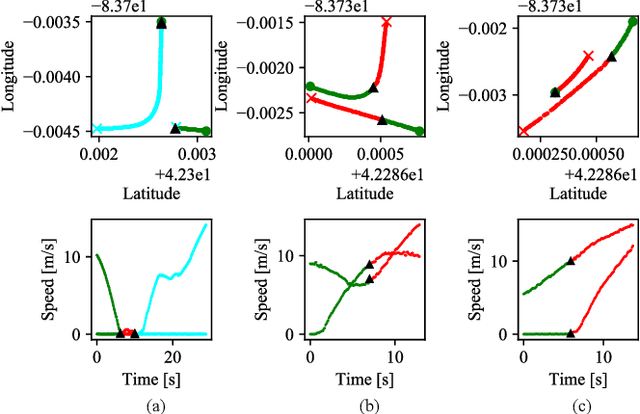
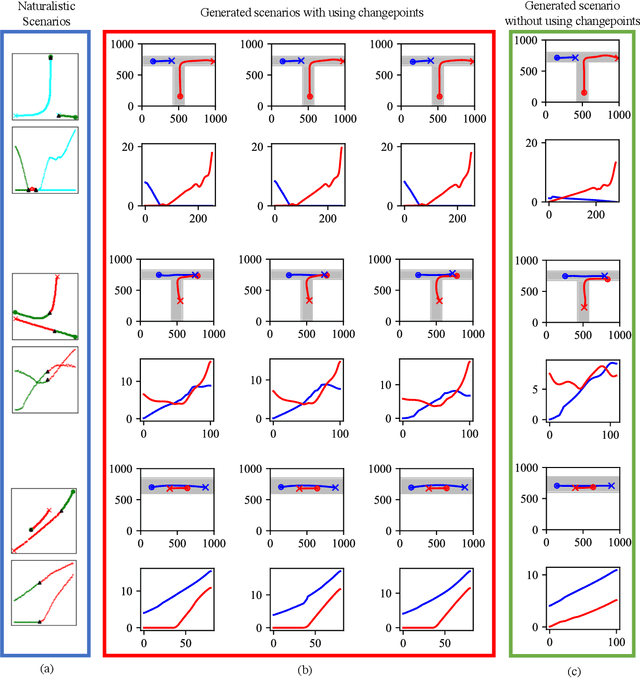
Generating multi-vehicle interaction scenarios can benefit motion planning and decision making of autonomous vehicles when on-road data is insufficient. This paper presents an efficient approach to generate varied multi-vehicle interaction scenarios that can both adapt to different road geometries and inherit the key interaction patterns in real-world driving. Towards this end, the available multi-vehicle interaction scenarios are temporally segmented into several interpretable fundamental building blocks, called traffic primitives, via the Bayesian nonparametric learning. Then, the changepoints of traffic primitives are transformed into the desired road to generate collision-free interaction trajectories through a sampling-based path planning algorithm. The Gaussian process regression is finally introduced to control the variance and smoothness of the generated multi-vehicle interaction trajectories. Experiments with simulation results of three typical multi-vehicle trajectories at different road conditions are carried out. The experimental results demonstrate that our proposed method can generate a bunch of human-like multi-vehicle interaction trajectories that can fit different road conditions remaining the key interaction patterns of agents in the provided scenarios, which is import to the development of autonomous vehicles.
How to Evaluate Proving Grounds for Self-Driving? A Quantitative Approach
Sep 24, 2019

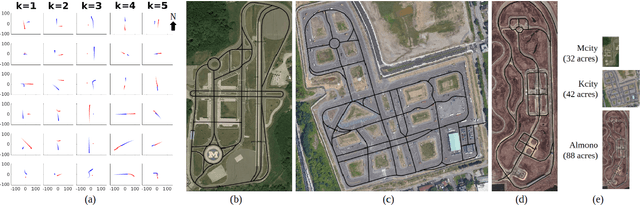

Proving ground has been a critical component in testing and validation for Connected and Automated Vehicles (CAV). Although quite a few world-class testing facilities have been under construction over the years, the evaluation of proving grounds themselves as testing approaches has rarely been studied. In this paper, we investigate the effectiveness of CAV proving grounds by its capability to recreate real-world traffic scenarios. We extract typical use cases from naturalistic driving events leveraging non-parametric Bayesian learning techniques. Then, we contribute to a generative sample-based optimization approach to assess the compatibility between traffic scenarios and proving ground road structure. We evaluate the effectiveness of our approach with three CAV testing facilities: Mcity, Almono (Uber ATG), and Kcity. Experiments show that our approach is effective in evaluating the capability of a given CAV proving ground to accommodate real-world driving scenarios.
Understanding V2V Driving Scenarios through Traffic Primitives
Jul 27, 2018


Semantically understanding complex drivers' encountering behavior, wherein two or multiple vehicles are spatially close to each other, does potentially benefit autonomous car's decision-making design. This paper presents a framework of analyzing various encountering behaviors through decomposing driving encounter data into small building blocks, called driving primitives, using nonparametric Bayesian learning (NPBL) approaches, which offers a flexible way to gain an insight into the complex driving encounters without any prerequisite knowledge. The effectiveness of our proposed primitive-based framework is validated based on 976 naturalistic driving encounters, from which more than 4000 driving primitives are learned using NPBL - a sticky HDP-HMM, combined a hidden Markov model (HMM) with a hierarchical Dirichlet process (HDP). After that, a dynamic time warping method integrated with k-means clustering is then developed to cluster all these extracted driving primitives into groups. Experimental results find that there exist 20 kinds of driving primitives capable of representing the basic components of driving encounters in our database. This primitive-based analysis methodology potentially reveals underlying information of vehicle-vehicle encounters for self-driving applications.